4 Determinants
The determinant is a scalar-valued function defined on the set of square matrices. Although the determinant is not a linear transformation on
It represents the scaling factor of volume (or area in 2D) under the associated linear transformation.
4.1 Determinants of Order 2
Definition: determinant of
If
then the determinant of
Example 4.1.1
For matrices
we have
The function
Nevertheless, the determinant does possess an important linearity property.
Meaning of determinant of order 2
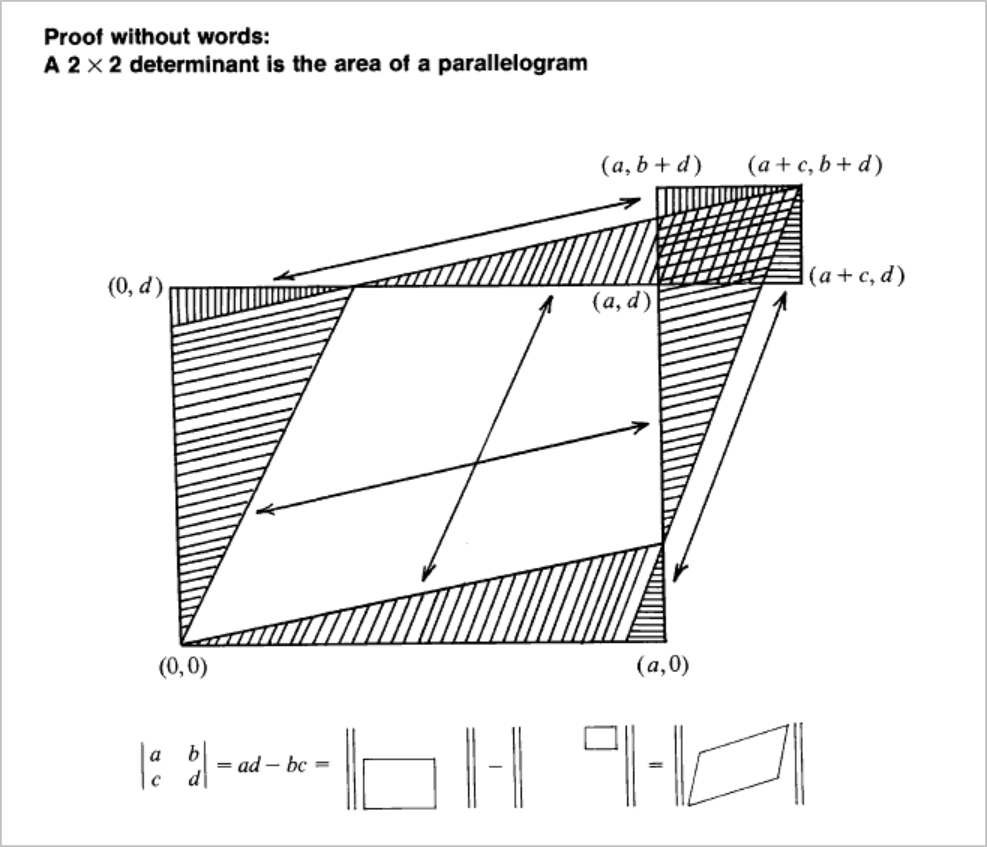
The vectors represented by a 2-by-2 matrix correspond to the sides of a unit square transformed into a parallelogram. The matrix
A determinant of
Theorem 4.1
The function
and similarly for the second row:
Theorem 4.2
For
4.2 Determinants of order
Definition
Let
The scalar
is called the cofactor of the entry of
denote the cofactor of the row
Thus the determinant of
Example 4.2.1 (3x3 Matrix determinant)
For
Using cofactor expansion along the first row of
Example 4.2.2
Calculate determinant of
Using cofactor expansion along the first row of
Example 4.2.3
For
Using cofactor expansion along the first row of
Example 4.2.4
The determinant of the
because
Theorem
Theorem 4.3
The determinant of an
whenever
Corollary
If an
Theorem 4.4
The determinant can be computed by cofactor expansion along any row
Corollary
If a matrix has two identical rows, then its determinant is zero.
Theorem 4.5
If
We now complete our investigation of how an elementary row operation affects the determinant of a matrix by showing that elementary row operations of type 3 do not change the determinant of a matrix.
Theorem 4.6
If
Corollary
If
Rules for Elementary Row Operations on Determinants:
- Interchange two rows: determinant changes sign.
- Multiply a row by scalar
: determinant multiplied by . - Add a multiple of one row to another: determinant unchanged.
Exammple 4.2.5
To evaluate the determinant of the matrix
in Example 2, we must begin with a row interchange. Interchanging rows 1 and 2 of
By means of a sequence of elementary row operations of type 3, we can transform
Thus
Example 4.2.6
The technique in Example 4.2.5 can be used to evaluate the determinant of the matrix
in Example 4.2.3, This matrix can be transformed into an upper triangular matrix by means of the following sequence of elementary row operations of type 3:
Thus
4.3 Properties of Determinants
The determinant of elementary matrices:
(a) Type 1 (row interchange): determinant =
(b) Type 2 (row scaling): determinant = scalar
(c) Type 3 (row addition): determinant =
Theorem 4.7 [core]
For any
Corollary
Matrix
and if invertible,
Theorem 4.8
For any
Cramer's Rule [core]
Theorem 4.9 Cramer's Rule
Let
where
Example 4.3.1 (Applying Cramer's Rule):
Solve the system
Matrix form:
Since
Thus the unique solution to the given system of the linear equation is
Geometric Interpretations of Determinants
: The matrix corresponds with some linear transformation, so solving means we‘re looking for a vector , which, after applying the transformation, lands on . : When it squishes 3D space onto the plane, or even if it squishes it onto a line or a point. Those all correspond to a determinant of zero, since any region is squished into something with zero volume. It's still possible that a solution exists even when there is no inverse. The absolute value of
equals the -dimensional volume of the parallelepiped formed by the rows (or columns) of . means the volume collapses to zero, i.e., the vectors are linearly dependent. Changing basis orientation changes the sign of
.
it is possible to interpret the determinant of a matrix
Example 4.3.2
The volume of the parallelepiped having the vectors
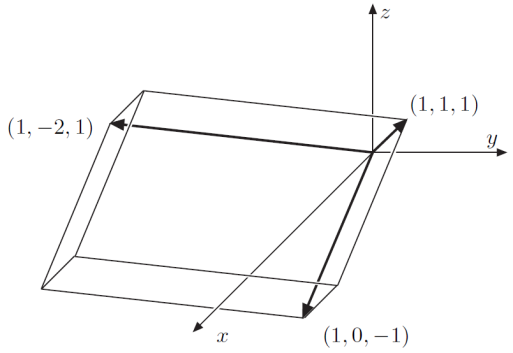
Note that the object in question is a rectangular parallelepiped (see Figure 4.6 ) with sides of lengths
row reducing and relationship
Continuing,
And,
Relationship to the Determinant
Note that we are also assuming that
Now the question is this. Under what condition on the quantity in the lower right corner of this last matrix will the original system be guaranteed to not have a unique solution? This would mean it would have no solutions or infinitely many.
Remember that the quantity in the lower right corner of the last matrix above is the coefficient of
Therefore, the condition for lack of a unique solution is
But this simplifies to
But the expression
Ultimately, we can say that the original linear system of three equations and three unknowns has a unique solution if and only if the determinant of its