Functions and Linear Transformations and Matrices
Addendic B: Functions
function
If
If
Finally, two functions
Example B.1
Suppose that
Then
one-to-one, onto
As example 1 shows, the preimage of an element in the range need not be unique. Functions s.t. each element of the range has a unique preimage are called one-to-one (injective); that is
If
one-to-one + onto = bijective
Let
- For example, let
, and . Then , whereas . Hence, . - Functionalcomposition is associative, i.e. if
is another function, then .
A function
The following facts about invertible functions are easily proved:
- If
is invertible, then is invertible, and . - If
and ar invertible, then is invertible, and .
2.1 Linear Transformations, Null Spaces, and Ranges
Linear Transformation
Now it's natural to consider those functions defined on vector spaces that in some sense "preserve" the structure.
Definition: linear transformation
Let
(additivity) (scaling)
Often simply all
Properties
- If
is linear, then ; is linear iff and ; (Generally used to prove that a given transformation is linear)[core] - If
is linear, then ; is linear iff for and , we have
Example 1
Define
To show that
we have
Also
So
Example 2: rotation
For any angle
Then
We determine an explicit formula for
Finally, observe that this same formula is valid for
Example 3&4: Reflection
Define
Define
Example 5: Polynominal
Define
So by property 2 above,
Example 6: integration
Let
for all
Special transformations
For vector spaces
We now turn our attention to two very important sets associated with linear transformations: the range and null space. The determination of these sets allows us to examine more closely the intrinsic properties of a linear transformation.
Definitions: null space/kernel; range / image [core]
Let
We define the range (or image)
Example 7: identity and zero transformation
Let
Example 8
Let
It's easy to verify that:
Theorem 2.1
Let
Theorem 2.2
Let
Recall Theorem 1.5 in §1 that the relation between subspace and span.
Example 9
Define the linear transformation
Since
Thus, we have found a basis for
Definition and Theorem
As in §1.6, we measure the "size" of a subspace by its dimension. The null space and range are so important that we attach special names to their respective dimensions.
Definition: nulity; rank [core]
Let
- Nullity of
, denoted , as the dimension of . - Rank of
, denoted , as the dimension of .
Theorem 2.3: Dimension Theorem [core]
Let
Theorem 2.4: Null Space and One-to-one [core]
Let
Theorem 2.5 [core]
Let
is one-to-one. is onto. .
Example 10
Let
Now
- Since
is linear independent, The rank is ; - Since
is not onto; - From the dimension theorem,
, so nullity is , and therefore .
So
Example 11
Let
It's easy to see that
Example 12
Let
Clearly
is linearly independent in
Theorem 2.6
Theorem 2.6
Let
Corollary
Let
Example 13
Let
and suppose that
2.2 The Matrix Representation of a Linear Transformations
coordinate vector
Definition: ordered basis
Let
Example 2.2.1
In
For the vector space
Definition: coordinate vector [core]
Let
We define the coordinate vecotr of
Example 2.2.2: coordinate vector for polynominal
Let
matrix representation
Definition: matrix representation [core]
Using the notation above, we call the
If
Notice that the jth column of
Example 2.2.3: matrix representation for tuples
Let
Let
and
Hence
If we let
Example 2.2.4: matrix representation for polynominal
Let
So
i.e.
Note that when
operations on linear transformation
Definition
Let
by for all ; by for all ;
Theorem 2.7
Let
- For all
is linear. - Using the operations of addition andscalar multiplication in the precedingg definition, the collection of all linear transformation from
to is a vector space over .
Definition
Let
Theorem 2.8
Let
for all scalars .
Example 2.2.5
Let
Let
(as completed in Example 2.2.3), and
If we compute
So
which is simply
2.3 Composition of Linear Transformations and Matrix Multiplication
matrix product
Theorem 2.9
Let
Theorem 2.10
Let
and for all scalars .
A more general result holds for linear transformations that have domains unequal to their codomains.
Definition: product
Let
where
This computation motivates the following definition of matrix multiplication.
why matrix multiplication is defined this way - it perfectly describes the composition of basis transformations. It's not an arbitrary definition, but rather a natural consequence of how basis transformations compose.
Definition: product of Matrix
Let
Example 2.3.1
We have
Notice again the symbolic relationship
As in the case with composition of functions, we have the matrix multiplication is not commutative. It need not be true that
transpose
The transpose
show that if
and
Therefore the transpose of a product is the product of the transposes in the opposite order.
Immediate consequence of our definition of matrix multiplication:
Theorem 2.11 [core]
Let
Corollary
Let
Example 2.3.2 [core]
Let
Let
The preceding
Definition and theorem
Definition: identity matrix
We define the Kronecker delta
Theorem 2.12.
Let
and . for any scalar . . - If
is an -dimensional vector space with an ordered basis , then .
Corollary.
Let
and
For an
With this notation, we see that if
then
Theorem 2.13
Let
, where is the jth standard vector over .
Theorem 2.14 [core]
Let
Example 2.3.3
Let
We illustrate Theorem 2.14 by verifying that
but also
left-multiplication transformation
Definition: left-multiplication transformation
Let
Example 2.3.4
Let
Then
then
Theorem 2.15
Let
. if and only if . and for all . - If
is linear, then there exists a unique matrix such that . In fact, . - If
is an matrix, then . - If
, then .
Theorem 2.16: Associative in Matrix Multiplication
Let
2.4 Invertibility and Isomorphisms
inverse
Definition: inverse
Let
The following facts hold for invertible functions
. ; in particular, is invertible.
We often use the fact that a function is invertible if and only if it is both one-to-one and onto. We can therefore restate Theorem 2.5 as follows.
- Let
be a linear transformation, where and are finite-dimensional spaces of equal dimension. Then is invertible if and only if .
Example 2.4.1
Let
Theorem
Theorem 2.17
Let
Definition: invertible
Let
If A is invertible, then the matrix B such that
Example 2.4.2
The reader should verify that the inverse of
dimension
Lemma
Let
Theorem 2.18: Judgement if invertible [core]
Let
Example 2.4.3
Let
For
It can be verified by matrix multiplication that each matrix is the inverse of the other.
Corollary 1
Let
Corollary 2
Let
isomorphism
Definitions: isomorphism
Let
Example 2.4.4
Define
Example 2.4.5
Define
It is easily verified that
Moreover, since
*orphism
a homomorphism preserves the structure, and some types of homomorphisms are:
- Epimorphism: a homomorphism that is surjectiv (AKA onto)
- Monomorphism: a homomorphism that is injective (AKA one-to-one, 1-1, or univalent)
- Isomorphism: a homomorphism that is bijective (AKA 1-1 and onto); isomorphic objects are equivalent, but perhaps defined in different ways
- Endomorphism: a homomorphism from an object to itself
- Automorphism: a bijective endomorphism (an isomorphism from an object onto itself, essentially just a re-labeling of elements)
Theorem about isomorphism
Theorem 2.19
Let
Corollary
Let
Theorem 2.20
Let
Corollary
Definition: standard representation
Let
Example 2.4.6
Let
We observed arlier that
Theorem 2.21
For any finite-dimensional vector space
Relationship
Let
Consider the following two composites of linear transformations that map
Map
into with and follow this transformation with ; this yields the composite . Map
into with and follow it by to obtain the composite .
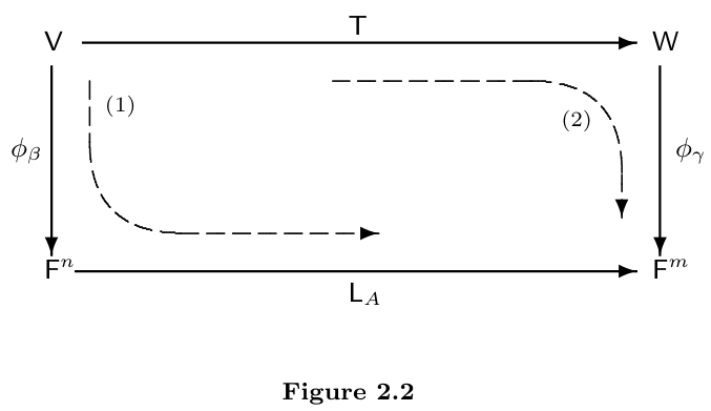
These 2 composites are depictedby the dashed arrows in the diagram. By a simple reformulation of Theorem 2.14, we may conclude that
(
That is, the diagram "commutes." Heuristically, this relationship indicates that after
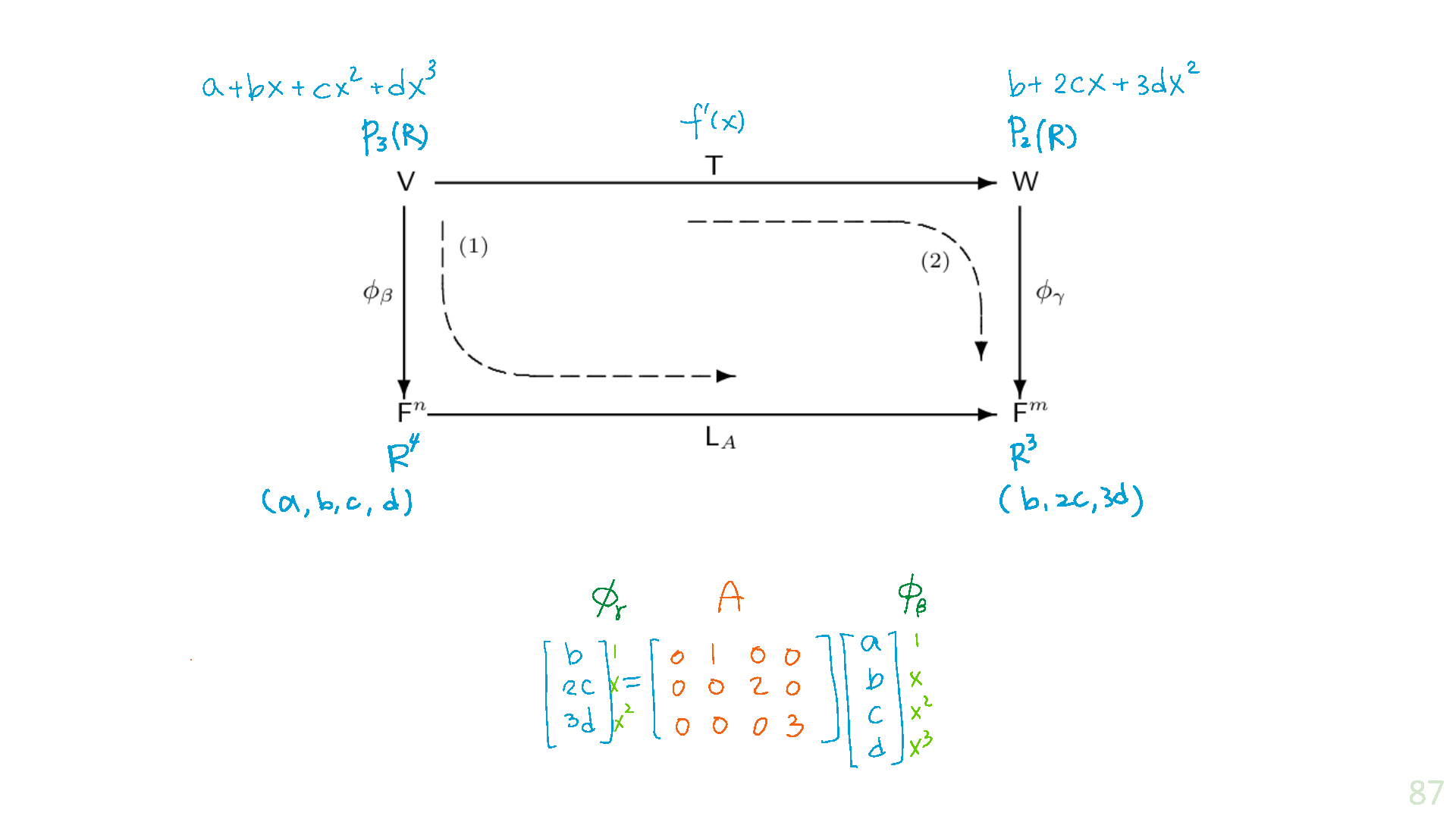
Example 2.4.7
Recall the linear transformation
If
Consider the polynomial
But since
So
2.5 The Change of Coordinate Matrix
Theorem 2.22
Let
is invertible. - For any
The matrix
for
Example 2.5.1
In
Since
the change of coordinate matrix
For instance,
For the remainder of this section, we consider only linear transformations that map a vector space
Theorem 2.23 [core]
Theorem 2.23
Let
Proof:
Example 2.5.2: Calculation about coordination change
Let
Let
be the ordered bases. It can be known that
(Here gives details about the result above)
Given that
And
So
The change of coordinate matrix that changes
and
hence, by theorem 2.23:
To show that this's the correct matrix, we can verify that the image under
Note that the coeffficients of the linear combination are the entries of the 2nd column of
Example 2.5.3: Application about coordination change [core]
Recall the reflection about the x-axis in Example 3 in Section 2.1. The rule
Therefore if we let
Then the matrix representing
Let
and
Then it can be verified that
Since
Corollary of Theorem 2.23
Corollary
Let
where
Example 2.5.4
Let
and let
which is an ordered basis for
So by the preceding corollary,
Definition
Let