Laplace Transform
- Formulation & Definition
- Properties
- Inversion of Laplace Transform
Formulation & Definition
Introduction
In mathematics, the Laplace transform, named after its inventor Pierre-Simon Laplace is an integral transform that converts a function of a real variable
For suitable functions
Here's the Fourier Transformation (for real number):
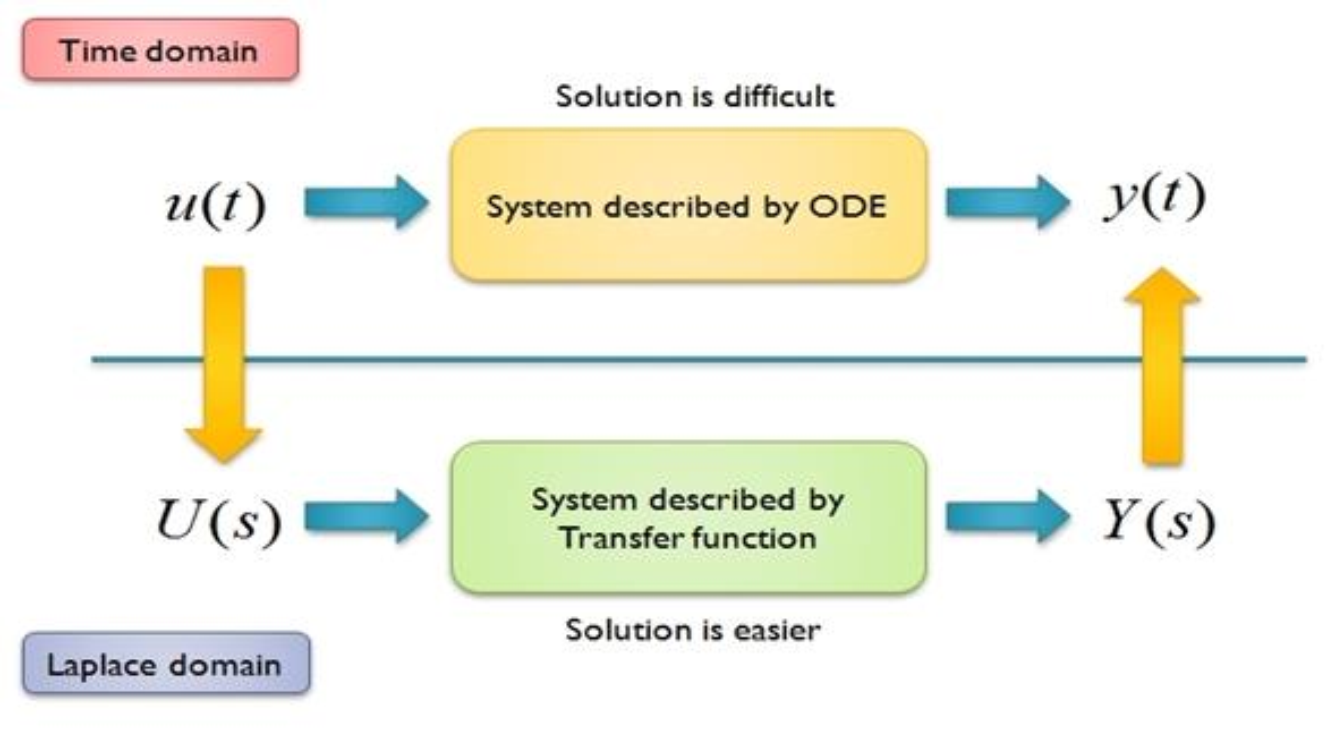
Why do we need Laplace Transform for solving ODE?
The Formulation of Laplace Transform
Definition: Laplace Transform
If a function
This function (when it exists) is called the Laplace transform of
Suppose that we require the solution of the differential equation:
for positive values of
- We first take the Laplace transform of both sides of the previous equation, by multiplying both sides of the equation by
and integrating the results with respect to from zero to infinity,
- The integral on the right is readily evaluated
the integral exists when
- As a result, we obtain
- Expand this expression by the method of partial fractions, to obtain the equivalent form
Reference to
, then indicates that, since is the transform of , the first term is the transform of and the second term the transform of . The original problem is now apparently reduced to the problem of determining a function
whose Laplace transform is given by the above equation Applying the inverse Laplace transform, one can obtain for
or for
Definition of Laplace Transform
The Laplace transform of a function
over that range of values of
The notation
The Existence of Laplace Transform
- Integration may fail to define a function of
, in particular, because of infinite discontinuities in for certain positive values of or because of failure of to behave in a sufficiently regular way near or for large values of . However, the presence of a finite number of finite discontinuities or "jumps" will not, in itself, affect the existence of the integral - A function
is said to be piecewise continuous in a finite range if it is possible to divide that range into a finite number of intervals such that is continuous inside each interval and approaches finite values as either end of any interval is approached from the interior. Such functions may thus have finite jumps at points inside the range considered
Sufficient additional condition to guarantee the existence of the third integral item
A function
If the bound is denoted by
the Laplace transform of
is continuous or piecewise continuous in every finite interval , where . is bounded near for some number , where . is bounded for large values of , for some number .
Examples for Laplace Transforms
Properties
Properties of Laplace Transform
Some most useful properties of Laplace transforms:
An integration by parts gives
if
is continuous and is piecewise continuous in every interval But since is of exponential order, the integrated part vanishes as (for ), and there follows
the integrated part vanishing at the upper limit (for sufficiently large values of
), since , and hence , is of exponential order. Thus, in general, if a function is integrated over , the transform of the integral is obtained by dividing the transform of the function by . If the lower limit differs from zero, the formula
is easily established.
If
In these equations
The Convolution Properity
if different "dummy variables" of integration (
and ) are used in defining the two transforms. If, in the inner integral of the last form, we replace by a new variable with the substitution there follows
and hence
Inversion of Laplace Transform
Inverse of the Laplace Transform
To determine the inverse transform of a given function
Since the unknown function
In more advanced works it is proved that if this equation has a solution, then that solution is unique. Thus, if one function having a given transform is known, it is the only possible one. This result is known as Lerch's theorem.
More precisely, Lerch's theorem states that two functions having the same transform cannot differ throughout any interval of positive length. Thus, for example, it's shown that the continuous solution of
is
Table: Laplace Transform
| Transform | Function | |
|---|---|---|
| T1 | ||
| T2 | ||
| T3 | ||
| T4 | ||
| T5 | ||
| T6 | ||
| T7 | ||
| T8 | ||
| T9 | ||
| T10 | ||
| T11 | 1 | |
| T12 | ||
| T13 | ||
| T14 | ||
| T15 | ||
| T16 | ||
| T17 | ||
| T18 | ||
| T19 | ||
| T20 | ||
| T21 | ||
| T22 | ||
| T23 | ||
| T24 | ||
| T25 | ||
| T26 | ||
| T27 | ||
| T28 | ||
| T29 | ||
| T30 | ||
| T31 | 1 | |
| T32 | ||
| T33 | ||
| T34 | ||
| T35 | ||
| T35a | ||
| T36 | ||
| T37 | ||
| T38 | ||
| T39 | ||
| T40 | ||
| T41 |
Table: Bessel functions of order half an odd integer
| -1/2 | ||
| 7/2 | ||
| Recurrence Formulas | ||
Method of Partial Fractions for the Inverse of Laplace Transform
For
where
(Heaviside cover-up method / Residue Method)Let
and hence, from (T12),
Example1: Inverse Laplace Transform
To determine
With
Example2: Inverse Laplace Transform
To determine
Pairs
Example3: Solving the following ODE with Laplace Transform
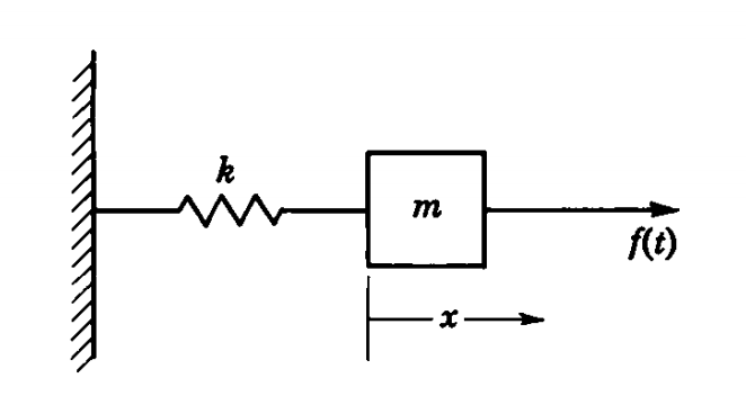
Forced vibration:
Thus, if we write
the transform of the required solution is
Since
in terms of an arbitrary force function
Example4: Solving the ODEs with Laplace Transform
We require the solution of the simultaneous equations
which satisfies the conditions
The transforms of equations satisfying initial conditions are
from which we obtain, algebraically,
If the first terms on the right-hand sides of these equations are expanded in partial fractions, there follows
and reference to Table 1 gives the required solution,
Laplace Transform: Beyond solving ODEs
The physical significance of Laplace Transform (LT): from time domain