3 Elementary Matrix Operations and Systems of Linear Equations
3.1 Elementary Matrix Operations and Elementary Matrices
Elementary Matrix Operations
Definitions: Elementary Matrix Operations
Let
- Interchanging any two rows [columns] of$A $;
- Multiplying any row [column] of
by a nonzero scalar; - Adding any scalar multiple of a row [column] of
to another row [column].
Any of these three operations is called an elementary operation. Elementary operations are of type 1, type 2, or type 3 depending on whether they are obtained by (1), (2), or (3).
Example 3.1.1
Let
Interchanging the second row of
Multiplying the second column of
Adding
elementary matrix
Definition: elementary matrix
An
Theorem 3.1
Let
Proof is skipped. Verifying Theorem 3.1 for each type of elementary row operation. The proof for column operations can then be obtained by using the matrix transpose to transform a column operation into a row operation.
Example 3.1.2
Consider the matrices
Note that
In the second part of Example 1,
Observe that
Theorem 3.2: inverse of elementary matrix
Elementary matrices are invertible, and the inverse of an elementary matrix is an elementary matrix of the same type.
3.2 The Rank of a Matrix and Matrix Inverses
Definition: rank
If
Theorem 3.3
Let
Every matrix
Theorem 3.4
Let
, , and therefore, .
Corollary
Let
is a subspace of ; .
Corollary
Elementary row and column operations on a matrix are rank-preserving.
Theorem 3.5
The rank of any matrix equals the maximum number of its linearly independent columns; that is, the rank of a matrix is the dimension of the subspace generated by its columns.
Example 3.2.1 (Rank Determination)
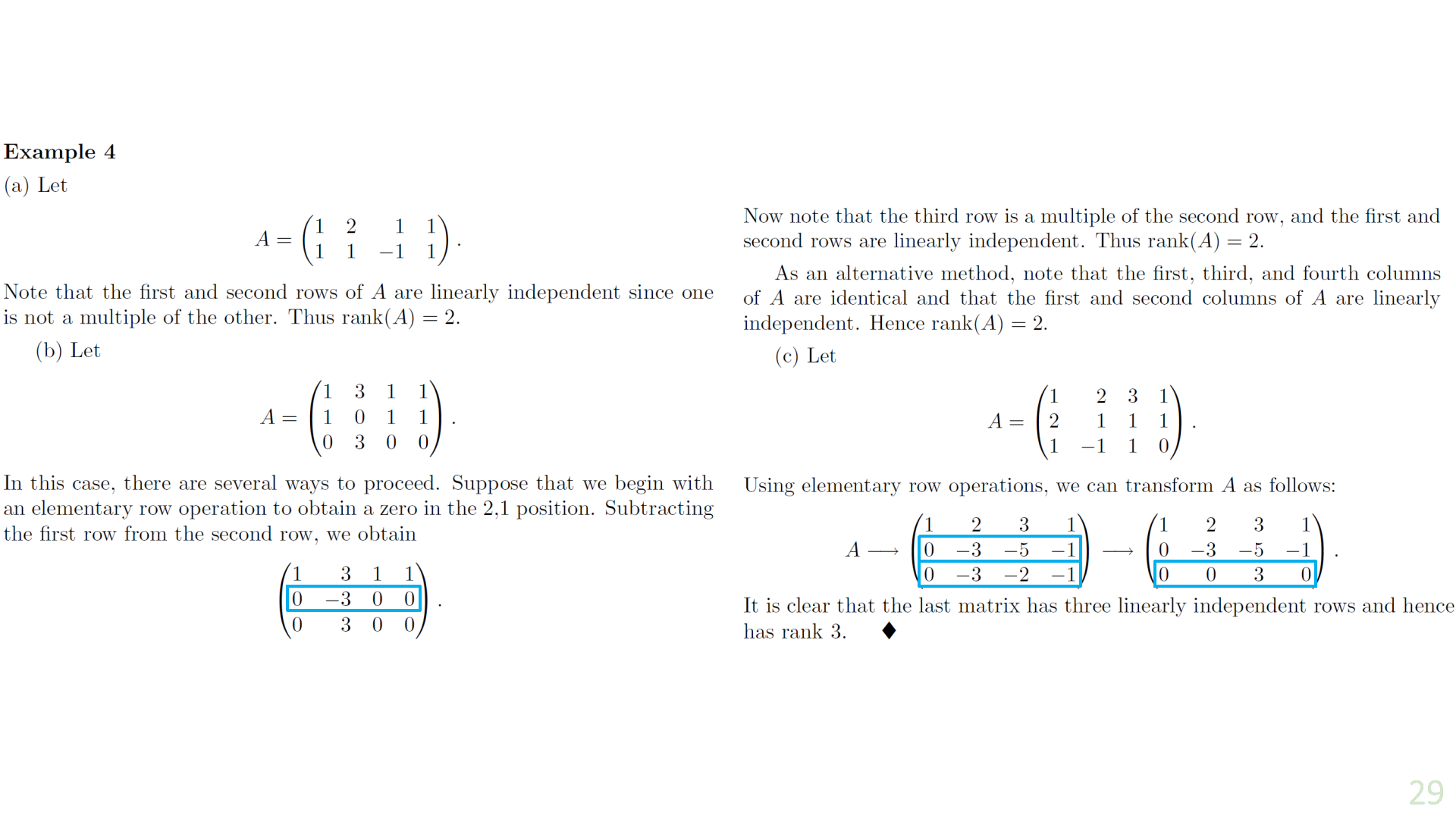
Let
Observe that the first and second columns of
Example 3.2.2
Let
If we substract the 1st row of
If we now substract twice the 1st column from the 2nd and substract the 1st column from the 3rd (type 3 elementary column operations), we obtain
It's now obvious that the maximum number of linearly independent columns of this matrix is
Theorem 3.6
Let
where
Example 3.2.3
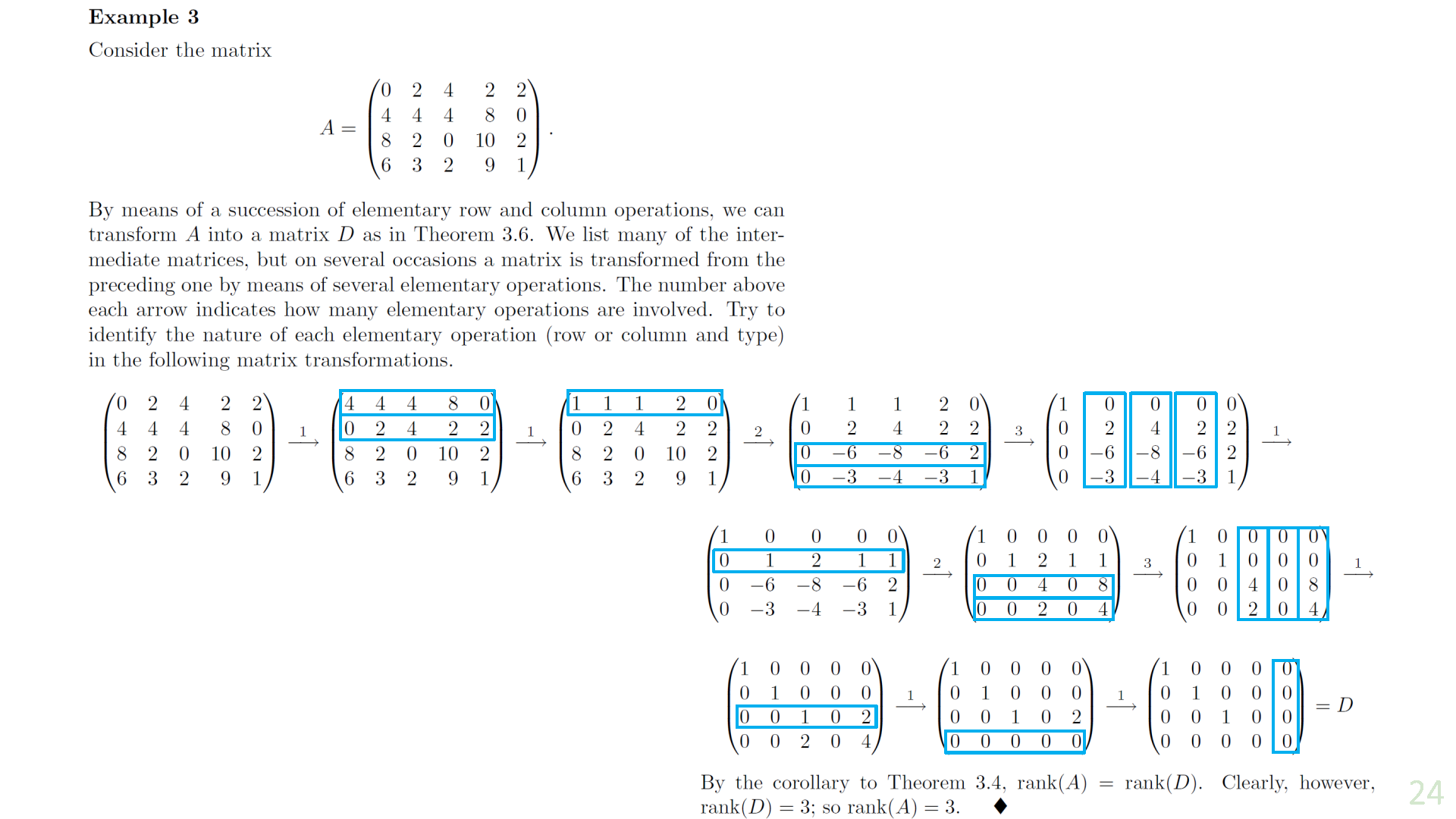
Conclusion about rank
Corollary 1
Let
is the
Corollary 2
Let
. - The rank of any matrix equals the maximum number of its linearly independent rows; that is, the rank of a matrix is the dimension of the subspace generated by its rows.
- The rows and columns of any matrix generate subspaces of the same dimension, numerically equal to the rank of the matrix.
Corollary 3
Every invertible matrix is a product of elementary matrices
Theorem 3.7
Let
Example 3.2.4
The Inverse of a Matrix
Definition: augented matrix
Let
Let
By Corollary 3 to Theorem 3.6,
Because multiplying a matrix on the left by an elementary matrix transforms the matrix by an elementary row operation (Theorem 3.1 p. 149), we have the following result: If
Conversely, suppose that
Letting
If, on the other hand,
Example 3.2.5
Example 3.2.6
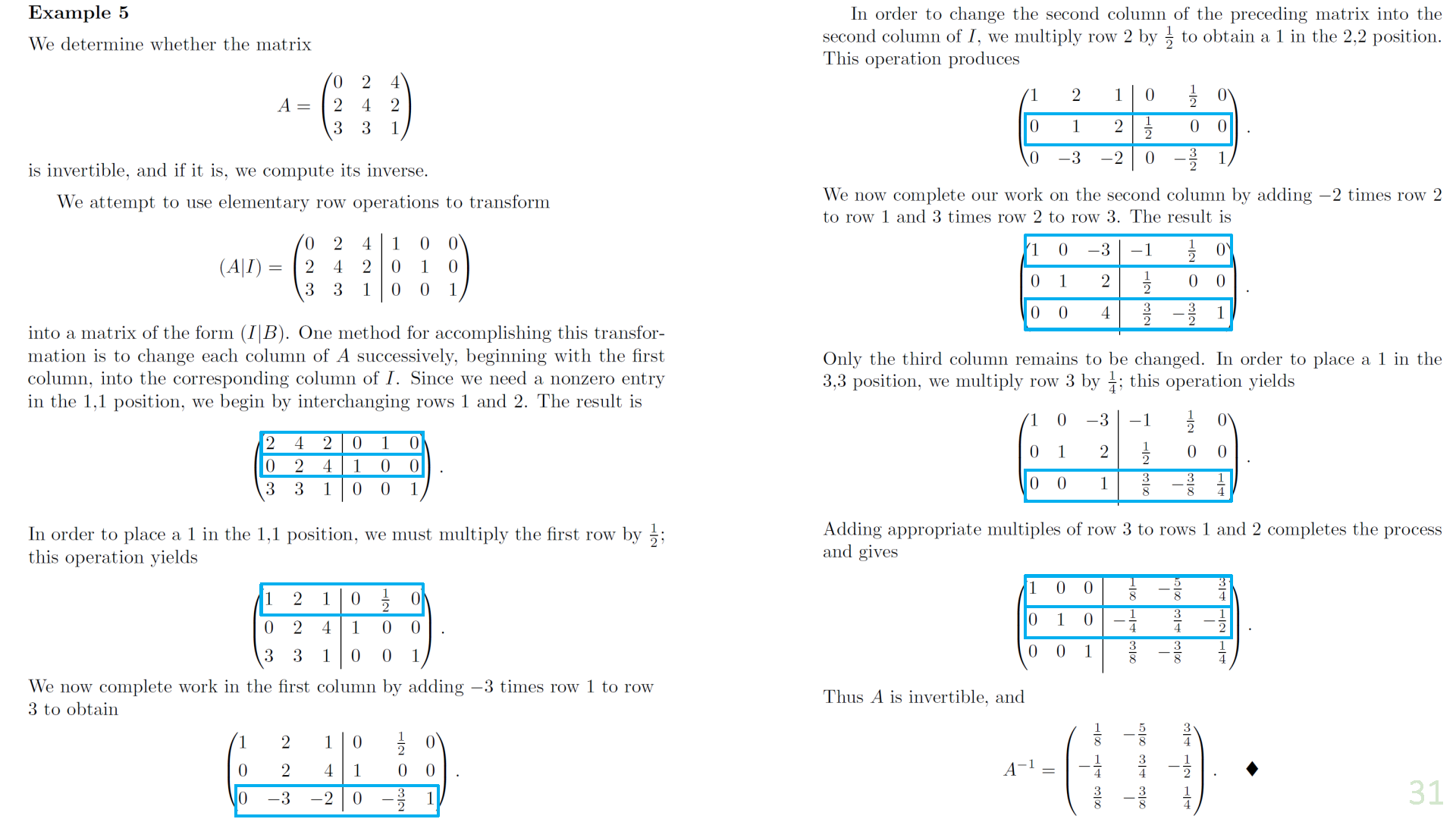
We determine whether the matrix
is invertible, and if it is, we compute its inverse. Using a strategy similar to the one used in Example 3.2.5, we attempt to use elementary row operations to transform
into a matrix of the form
is a matrix with a row whose 1st 3entries are zeros. Therefore
Example 3.2.7 [core]
Let
where
Using the method of Examples 5 and 6,
Thus
Therefore
3.3 Systems of Linear Equations - Theoretical Aspects
The system of equations
where
The
is called the coefficient matrix of the system
We can write the system as a single matrix equation
where
To exploit the results that we have developed, we often consider a system of linear equations as a single matrix equation.
A solution to the system
such that
Example 3.3.1
(a) Consider the system
The solution is unique:
In matrix form:
(b) Consider the system
which has infinitely many solutions, such as:
(c) Consider
that is
It's evident that this system has no solutions. Thus we see that a system of linear equations can have one, many, or no solutions.
homogeneous
Definitions: homogeneous
A system
Theorem 3.8
Let
Corollary
If
Example 3.3.2 [core]
(a) Consider the system
Let
be the coefficient matrix of this system. It is clear that
is a solution to the given system, it is a basis for
where
(b) Consider the system
are linearly independent vectors in
Theorem 3.9
Let
Example 3.3.3
(a) Consider the system
The corresponding homogeneous system is the system in Example 3.3.2(a). It is easily verified that
is a solution to the preceding nonhomogeneous system. So the solution set of the system is
by Theorem 3.9.
(b) Consider the system
The corresponding homogeneous system is the system in Example 3.3.2(b). Since
is a solution to the given system, the solution set
Theorem 3.10
Theorem 3.10
Let
Conversely, if the system has exactly one solution, then
Example 3.3.4
Consider the system:
Using the inverse matrix of the coefficient matrix, the unique solution is
Theorem 3.11
Theorem 3.11
Let
Example 3.3.5
Recall the system of equations
in Example 3.3.1(c). Since
Because the two ranks are unequal, the system has no solutions.
Example 3.3.6
We can use Theorem 3.11 to determine whether
We check if
Since the rank of the coefficient matrix is 2 but the augmented matrix is 3, this system has no solutions. Hence
3.4 Systems of Linear Equations - Computational Aspects
Definition: equivalent
Two systems of linear equations are called equivalent if they have the same solution set.
Theorem 3.13
Let
Corollary
If
Gaussian Elimination Method Outline:
- Form the augmented matrix
. - Use elementary row operations to transform
into reduced row echelon form. - Solve the system from the reduced form using back substitution.
We now describe a method for solving any system of linear equations.
Consider the system:
First, form the augmented matrix:
Then perform elementary row operations to transform it into an upper triangular matrix in reduced row echelon form using steps involving row interchanges, scaling, and elimination as described.
- In the leftmost nonzero column, create a 1 in the first column;
- By means of type 3 row operations, use the first row to obtain zeros in the remaining positions of the leftmost nonzero column;
- Create a 1 in the next row in the leftmost possible column, without using previous rows;
- Use type 3 elementary row operations to obtain zeros below the 1 created in the preceding step;
- Repeat 3 and 4 until no nonzero rows remain;
- Work upward, beginning with the last nonzero row, and add multiples of each row to the rows above. Repeat the process for each preceding row until it is performed with the 2nd row, at which time the reduction process is completed.
Definition: Reduced row echelon form
A matrix is said to be in reduced row echelon form if it satisfies: (a) Any row containing a nonzero entry precedes any row with all zero entries.
(b) The first nonzero entry in each row is the only nonzero entry in its column.
(c) The first nonzero entry in each row is 1 and it occurs to the right of the first nonzero entry in the preceding row.
The method described with forward elimination and back substitution is known as Gaussian elimination.
Theorem 3.14
Gaussian elimination transforms any matrix into its reduced row echelon form.
Theorem 3.15
Let
. - If the general solution is
then
Theorem 3.16
Let
(a) The number of nonzero rows in
(b) For each
(c) The columns of
(d) For each
Corollary
The reduced row echelon form of a matrix is unique.
Example 3.4.2
Let
The reduced row echelon form of
Since
Let the columns of
Example 3.4.3
The set
generates a subspace
consisting of the images of the polynomials in
is a basis for the subspace of
is a basis for the subspace
Example 3.4.4 [mid-term]
Let
It is easily verified that
is a linearly independent subset of
To extend
and assign parametric values to
Hence
is a basis for
The matrix whose columns consist of the vectors in
and its reduced row echelon form is
Thus
is a basis for