Mechanical Vibrations: Second-Order Systems
Introduction to Vibrational Systems
In the field of mechanical engineering, we define vibration as any motion that repeats itself after a specific interval of time. As you begin modeling complex machinery, it is vital to recognize that nearly all vibratory systems can be reduced to three essential building blocks:
- Spring (Elasticity): A component that stores potential energy.
- Mass (Inertia): A component that stores kinetic energy.
- Damper: The mechanism through which energy is dissipated.
The fundamental physics of vibration involves the continuous transfer of energy between potential and kinetic states. When a system's mass is displaced from its equilibrium, the spring exerts a restoration force. The mass then gains momentum, overshooting the equilibrium position due to its inertia, which results in the characteristic oscillatory motion we study.
Practical Application: Note that understanding these building blocks is the foundation of structural stability. By correctly modeling these components, engineers can predict how a structure will react to external forces, ensuring that vibrations remain within safe limits to prevent structural fatigue or catastrophic failure.
Classification of Vibrational Motion
Before diving into the mathematics, we must classify the motion based on the system components and the predictability of the excitation forces.
| Classification | Definition |
|---|---|
| Undamped Vibration | Occurs when no energy is lost or dissipated through friction or resistance during oscillations. |
| Damped Vibration | Occurs when energy is dissipated through friction or other resistances, eventually bringing the system to rest. |
| Linear Vibration | A system where all components—the spring, mass, and damper—behave linearly. |
| Nonlinear Vibration | A system where any of the basic components behave nonlinearly. |
| Deterministic Vibration | A system where the magnitude of the excitation (force or motion) is known at any given time. |
| Nondeterministic (Random) Vibration | A system where the value of the excitation at a given time cannot be predicted and is characterized as irregular and fluctuating. |
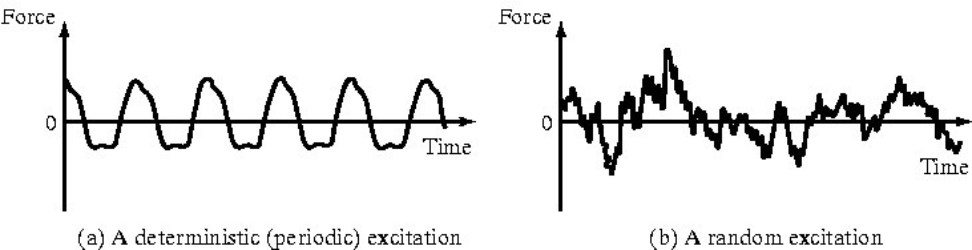
Observe the difference in the force-time histories: the deterministic plot shows a clear, periodic pattern, whereas the random excitation plot shows irregular, fluctuating values where no specific magnitude can be predicted for a future time step.
Modeling the Simple Harmonic Oscillator
To analyze any vibrational system, we must derive its governing Equation of Motion. We rely on Newton’s Second Law: F = ma. In a standard second-order system, we must account for several specific forces.
The Newtonian Sum of Forces:
- Restoration force of the spring:
- Damping force:
- Gravity (Weight):
- Static restoration force:
(The force required to offset gravity at rest) - External Force:
Synthesized Equation of Motion: When we apply
In static equilibrium, the weight of the mass is perfectly balanced by the spring's static deflection force (
Solving Second-Order Differential Equations
To determine the system response, we solve the homogeneous equation
By solving for the roots
- Distinct Real Roots (
): The system is overdamped. The general solution is . - Complex Roots (
): The system is underdamped. The solution is oscillatory: . - Repeated Roots (
): The system is critically damped. The solution is .
System Responses and Damping Characteristics
The Damping Ratio (
- Overdamped (
): High resistance; the mass creeps back to equilibrium without ever crossing it. - Critically Damped (
): The threshold state where the system returns to equilibrium in the shortest time possible without oscillation. - Underdamped (
): The system oscillates with diminishing amplitude. The response is described by: .
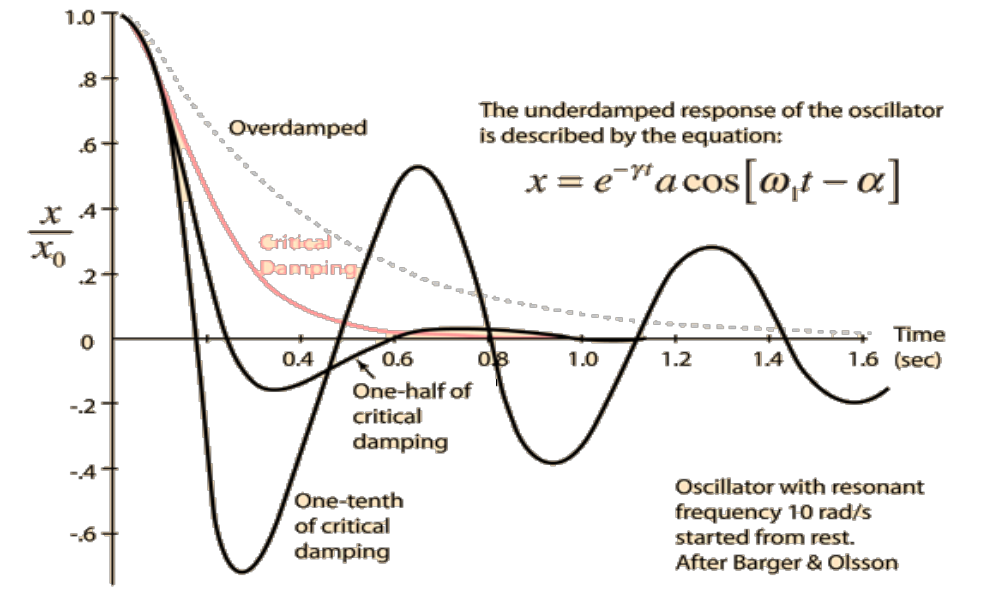
Observe the decay curves. A system with "one-tenth of critical" damping (
Key Takeaway: It is vital to select appropriate damping levels to avoid Aerodynamic Flutter. Without sufficient damping, aerodynamic forces can cause unstable, growing oscillations in structures like aircraft wings or bridges, leading to total structural failure.
Frequency Domain Analysis: Laplace Transforms
Engineers use the Laplace Transform to convert second-order differential equations from the time domain (
- The operator
- Circular natural frequency:
, actual damping / critical damping
We derive the Transfer Function,
To reach the standard engineering form, we normalize this into the Transfer Function
The frequency response can be written as
The magnitude is:
Define the normalized frequency as
In the frequency domain, we analyze the Bandwidth, which is the range of frequencies over which the system responds significantly. This bandwidth varies based on the damping ratio
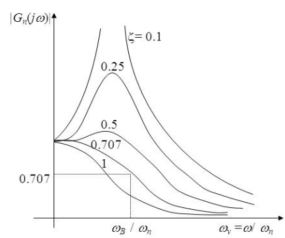
These plots illustrate resonance. As the frequency ratio
Free Vibrations of Undamped Systems
Free vibration occurs when a system oscillates purely under an initial disturbance (
Classified by damp:
- Undamped vibrations result when amplitude of motion remains constant with time (e.g., in a vacuum)
- Damped vibrations occur when the amplitude of free vibration diminishes gradually overtime, due to resistance offered by the surrounding medium (e.g., air)
Classified by system:
- The Horizontal System: Frictionless motion results in:
- The Vertical System: As established in Section 3, gravity (
) and static deflection ( cancel out, yielding the same result:
This indicates that when a mass moves in a vertical direction, we can ignore its weight, provided we measure
The Euler Bridge to Harmonic Motion: We initially assume a solution in complex exponentials:
Applying Initial Conditions:
By solving for constants using initial displacement
The motion equation and its solution are harmonic functions of time.
The motion equation
where
- For vertical system, the spring constant:
Hence:
Hence, natural frequency in cycles per second:
and, the natural period:
- Velocity
and the acceleration of the mass at time can be obtained as:
- If initial displacement (
) is zero,
- If initial velocity (
) is zero,
Free Vibration with Viscous Damping
Damping force:
In the vertical system, Newton’s law yields the equation of motion:
Assume a solution in the form:
Hence, the characteristic equation is
The roots of which are:
These roots give two solutions to:
Critical Damping Constant and Damping Ratio: The critical damping
The damping ratio
Thus, the general solution is
Assuming that
Case 1: Underdamped system (
): For this condition, is negative and the roots are: and the solution can be written in different forms:
For the initial conditions at
: and hence the solution becomes
The above equation describes a damped harmonic motion. Its amplitude decreases exponentially with time, as shown in the figure below.
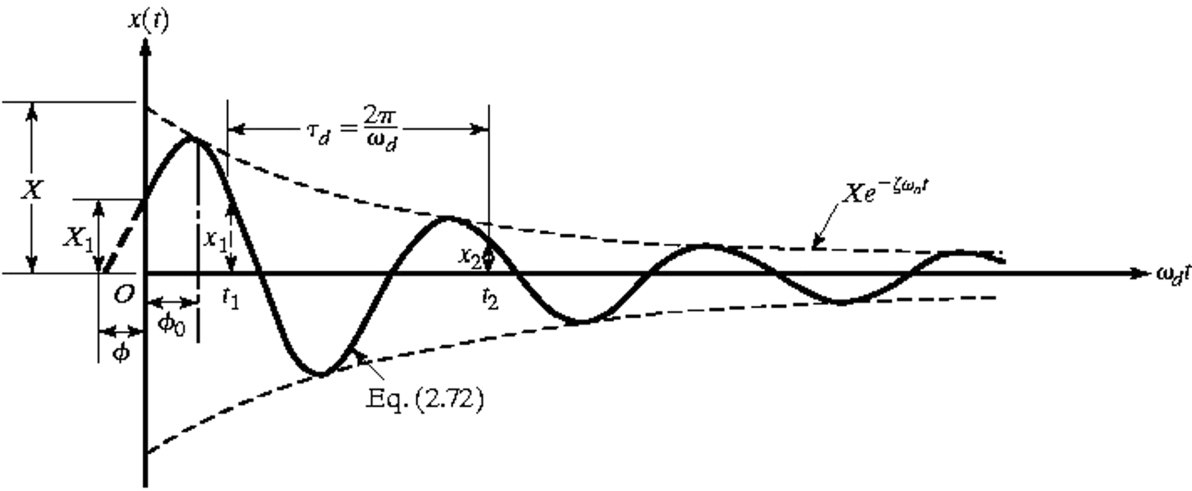
Figure 4: Undamped system. The frequency of damped vibration is:
Case 2: Critically damped system(
): In this case, the two roots are: Due to repeated roots, the solution is given by:
Application of initial conditions gives:
Thus, the solution becomes:
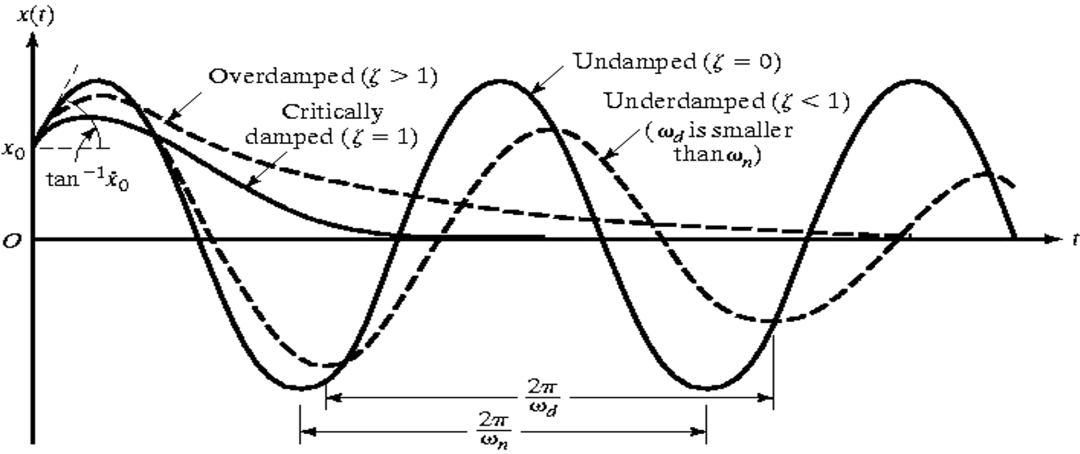
Figure 5: Critical damped system. It can be seen that the motion represented by the above equation is aperiodic (i.e., nonperiodic). Since
as , the motion will eventually diminish to zero. Case 3: Overdamped system: (
): The roots are real and distinct and are given by: In this case, the solution is given by:
For the initial conditions at
,
Energy dissipated in Viscous Damping
In a viscously damped system, the rate of change of energy with time is given by:
The energy dissipated in a complete cycle is:
If we assume simple harmonic motion:
Advanced Harmonic Motion Concepts
To fully describe harmonic motion, we use several specific parameters:
- Natural Frequency (
): The angular frequency calculated as . - Natural Period (
): The time for one cycle, . - Frequency (
): Cycles per second (Hz), . - Amplitude (
): The maximum displacement, . - Phase Angle (
): The initial angle of oscillation, .