Angle
Introduction [1]
Unfortunately, similar to the displacement-based approach, a bearing-constrained formation requires either the global coordinate system for each agent or developing observers based on inter-agent communications. The authors in some research achieved bearing-based formation control in the absence of the global coordinate system, but each agent should have a controllable quantity determining the relationship between the local body frame and the global coordinate frame.
1. 2D Angle Rigidity [1][3]
Definition of angle rigidity in 2D
We still use
from the Chapter: Bearing Rigidity in arbitary dimension
In this section, we develop an angle rigidity theory to investigate how to encode geometric shapes of graphs embedded in the plane through angles only.
For a framework
We can also use
For the angle, given nonoverlapping positions
where
We should note that a framework often has redundant angle information for shape determination.
For example, in Figure 1(a), once
For a framework
For the sake of notational simplicity, we denote
It is easy to see that whether
Definition: Equivalency and congruency abut angle rigidity
Two angularities
They are congruency if
Definition: angle rigid
A framework
With equivalent and congruent relationships, here is another type of definition: An angularity
Definition of angle rigidity with equivalent and congruent implies that every configuration which is sufficiently close to
Definition: globally angle rigid
A framework
With equivalent and congruent relationships, here is another type of definition: An angularity
Definition: minimally angle rigid
A framework
By these definitions, the frameworks (a) and (c) in Figure 1 are both globally angle rigid. For the framework (b), by moving the vertices along the blue arrows,
As is clear from Definitions of angle rigidity and global angle rigidity, global angle rigidity always implies angle rigidity. A natural question to ask is whether angle rigidity also implies global angle rigidity. In fact, for bearing rigidity, it has been shown that indeed global bearing rigidity and bearing rigidity are equivalent. However, this is not the case for angle rigidity:
Theorem 0: Nonequivalence between angle rigidity and global angle rigidity
An angle rigid angularity
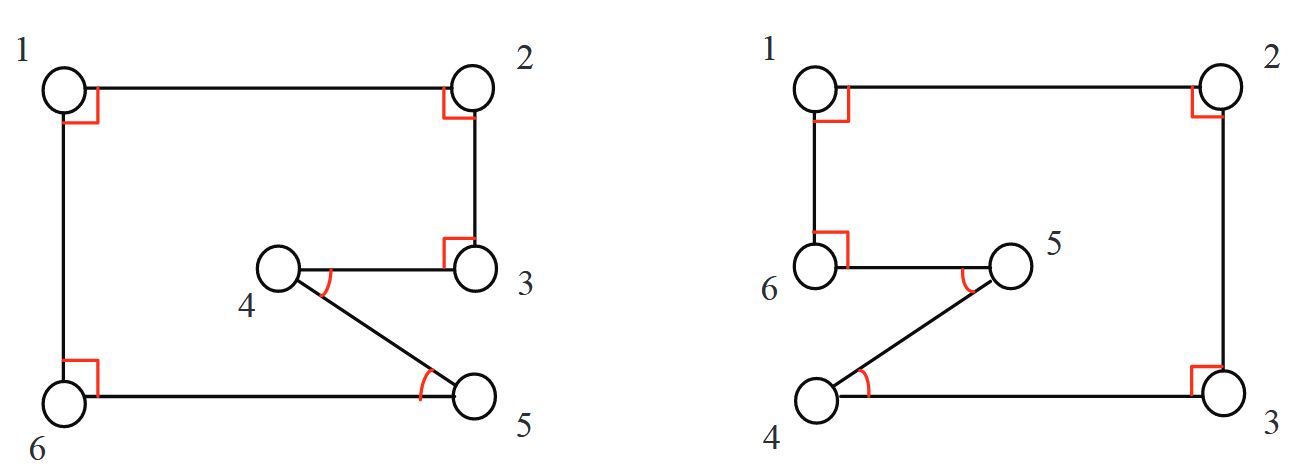
Here is an example, see Figure 2.
- Since two of its angles
and have been constrained, the remaining is uniquely determined to be , no matter how is locally perturbed. - The constraint on
requires must lie in the ray starting from and rotating from ray counter-clockwise by ; at the same time, the constraint on requires must lie on the arc passing through and such that the inscribed angle is . No matter how is locally perturbed, there is only one unique position for in the neighborhood of its current given coordinates because the two intersection points between the ray and the arc are not in the same local neighborhood. This local uniqueness implies that this four-vertex angularity is angle rigid (when ’s position is uniquely determined, any angle associated with it is also uniquely determined). - Note that there is the other intersection point
as shown in Figure 2 satisfying the angle constraints given in .
Bearing rigidity is a global property because the bearing constraints always represent linear constraints in the end point’s position and two noncollinear rays have at most one intersection.
In contrast, the angle constraint can be:
- linear constraint in
when it requires the corresponding vertex to be on a ray; - quadratic in
when it restricts the corresponding vertex to be on an arc passing through other vertices.
The possible nonlinearity in the angle constraints gives rise to potential ambiguity of the vertices’ positions under the given angle constraints.
Note that the embedding of
- Figure 3(a) shows that
, , and are not collinear, and then this angularity is in general not rigid since if we perturb point in an arc with and as the arc’s ending points, can be the same while angles and change. - In Figure 3(b),
, , and are collinear and is on one side; in this case, if the angle constraint happens to be , then one can check the angularity becomes angle rigid, although it is not globally rigid since the angle of changes by degree if we swap and . - In Figure 3(c),
, , and are collinear and is in the middle; when the constraint becomes , one can check that the angularity is not only rigid, but also globally rigid (swapping of and in this case does not change the resulting angles , being zero).
So the angularity
Definition: Generic position
The position vector
An example for nongeneric positions is the case when three points are collinearly positioned. Note that angle rigidity for
Definition: subangularity
For two angularities
We first clarify that for the smallest angularities, namely those that contain only three vertices, there is no gap between angle rigidity and global angle rigidity assuming generic positions.
Lemma 0
For a 3-vertex angularity, if it is generically angle rigid, it is also generically globally angle rigid.
Proof: For this 3-vertex angularity
Now, we define linear and quadratic constraints.
Definition: Linear and quadratic constraints
- For a given angularity
, a new vertex positioned at is linearly constrained w.r.t. if there is such that and is constrained to be on a ray starting from ; is quadratically constrained w.r.t. if there are such that is generic and is constrained to be on an arc with and being the arc’s two ending points.
Correspondingly, we call
As shown in Figure 2,
Similar to Henneberg’s construction in distance rigidity, in the following, we define two types of vertex addition operations in angle rigidity to demonstrate how a bigger angularity might grow from a smaller one, which are shown in Figure 4.
Definition: Type-I vertex addition
For a given angularity
- Case 1: 2 linear constraints, not aligned, associated with 2 distinct vertices in
(1 vertex for 1 constraint and the other vertex for the other constraint). - Case 2: 1 linear constraint and 1 quadratic constraint associated with 2 distinct vertices in
(1 for the former and both for the latter). - Case 3: 2 different quadratic constraints associated with 3 vertices in
(2 for each and 1 is shared by both), and the positions of and these 3 vertices are generic.
Definition: Type-II vertex addition
For a given angularity
- Case 1: 1 linear constraint and 1 quadratic constraint associated with three distinct vertices in
(1 for the former and the other 2 for the latter); - Case 2: 2 different quadratic constraints associated with 4 vertices in
(2 for the former and the other 2 for the latter), and the positions of and these 4 vertices are generic.
Remark:
- Although the types of constraints are similar between Case 2 of Type-I and Case 1 of Type-II, the numbers of vertices involved in Case 2 of Type-I and Case 1 of Type-II differ in these two types of vertex addition operations. Similarly, those in Case 3 of Type-I and Case 2 of Type-II are also different.
- Note that in these two vertex addition operations, the involved vertices are required to be in generic positions. However, the overall angle rigid angularity
constructed through a sequence of vertex addition operations is not necessarily generic, and an example is given in Figure 5.
Now we are ready to present a sufficient condition for global angle rigidity using Type-I vertex addition.
Proposition 1: Sufficient condition for global angle rigidity
An angularity is globally angle rigid if it can be obtained through a sequence of Type-I vertex additions from a generically angle rigid
Proof:
Details of Proof
According to Lemma 0, the generically angle rigid
- If case 1 applies, then the position
of the newly added vertex is unique since two rays, not aligned, starting from two different points may intersect only at one point; - If case 2 applies,
is again unique since a ray starting from the end point of an arc may intersect with the arc at most at one other point; - If case 3 applies,
is unique since two arc sharing one end point on different circles can only intersect at most at one other point.
Therefore,
In comparison, Type-II vertex additions can only guarantee angle rigidity, but not global angle rigidity.
Proposition 2: Sufficient condition for angle rigidity
An angularity is angle rigid if it can be obtained through a sequence of Type-II vertex additions from a generically angle rigid
The proof can be easily constructed following similar arguments as those for Proposition 1. The only difference is that
After having presented our results on angularity and angle rigidity, in the following section, we discuss infinitesimal angle rigidity, which relates closely to infinitesimal motion.
Infinitesimal Angle Rigidity
From [1]
Similar to distance and bearing rigidity theory, we define the infinitesimal angle motion as a motion preserving the invariance of
From the Chapter: Lemma 6 of Chapter: Bearing rigidity, we know that
where
Next we define infinitesimal angle rigidity, to do this, we should distinguish all trivial motions for an angle-constrained geometric shape. By an intuitive observation, the motions always preserving invariance of angles in the framework are translations, rotations, and scalings. Therefore, the dimension of the trivial motion space is
Definition: infinitesimally angle rigid
A framework
By this definition, the frameworks in Figure 1 (a) and (c) are both infinitesimally angle rigid. The frameworks (b) and (d) are not infinitesimally angle rigid since they both have nontrivial infinitesimal angle motions, which are interpreted by the arrows in blue.
In this paper, we say an angle index set
It is easy to see from Definitions above that the angle rigidity property of a framework
From [3]
Angle Rigidity Matrix
We consider an arbitrary element
Differentiating both sides of formula above w.r.t. time leads to
where
where
where
For an angularity, its angle preservation motions satisfy
Note that
Lemma 1: Rank of angle rigidity matrix
For an angle rigidity matrix
Proof:
Detail of Proof
Because each row sum of
where we have used the fact that
where we have used the fact that
Since
Obviously the row rank of the angle rigidity matrix, or equivalently its row linear dependency, is a critical property of an angularity. We capture this property by using the notion of “independent” angles.
Definition: Independent angles
For an angularity
Since rank is a generic property of a rigidity matrix, one may wonder whether it is possible to disregard
Using the notion of infinitesimal motion, checking the rank of the rigidity matrix can also enable us to check “infinitesimal” angle rigidity.
Infinitesimal Angle Rigidity
To consider infinitesimal motion, suppose that each
where
Now we are ready to define infinitesimal angle rigidity.
Definition: Infinitesimal angle rigidity
An angularity
In fact, a motion satisfying
Theorem Parts
From [1] about theorem
The following lemma gives the specific form of trivial motions preserving invariance of angles.
Lemma 2
The trivial motion space for angle rigidity in
is the space formed by infinitesimal rotations; is the space formed by infinitesimal scalings; is the space formed by infinitesimal translations.
where
Proof:
Details of Proof
In the Chapter: Bearing rigidity in arbitary dimension, the authors showed that
Next we show
Let
This completes the proof.
Lemma 3
A framework
In the Chapter: basis, it's shown that the set
Theorem 1
Let
where
The proof will be presented in later subsections.
With the aid of Theorem 1, we can derive the relationship between infinitesimal angle rigidity and angle rigidity, which is as follows.
Theorem 2
If
Proof:
By Proposition 1 from the Chapter: Basis and
The converse of Theorem 2 is not true. A typical counter-example is the framework
From [3] aboout Theorem
Theorem 3: Sufficient and necessary condition for infinitesimal angle rigidity
An angularity
Proof:
Details of Proof
In view of the definition,
Note that this theorem implies that
- A cycle formed by the triplets in
and . For example, [See Figure 6 (a)] - Triplets with the same middle vertex and
. For example, [See Figure 6 (b)] - An angle subset
such that the number of the involved vertices in satisfies . For example, and , and thus , in Figure 6 (c).
If
Theorem 4: Combinatorial **necessary** condition for infinitesimal angle rigidity
For an angularity
Proof:
Details of Proof
From Theorem 3, we know
which implies the row dependence in
Now we show the relationship between angle rigidity and infinitesimal angle rigidity.
Theorem 5: Relationship between infinitesimal angle rigidity and angle rigidity
If an angularity
Proof:
Details of Proof
From the definition, we know that if
For infinitesimally angle rigid angularities, we now discuss when its number of angles in
Definition: Minimal angle rigidity
An angularity
Since
Lemma 4
An angularity
For an infinitesimally minimally distance rigid framework, there must exist a vertex associated with fewer than
However, for an infinitesimally minimally angle rigid angularity, the situation is more challenging, which in fact prevents drawing similar conclusions as the Henneberg construction does for distance rigidity. To be more precise, we have the following lemma.
Lemma 5
For an infinitesimally minimally angle rigid angularity
Proof:
Details of Proof
If every vertex is involved in at least
In Figure 7, we show an infinitesimally minimally angle rigid angularity whose vertices are all involved in
Note that if an angularity
The relation to infinitesimal bearing rigidity
In this subsection, we will establish some connections between angle rigidity and bearing rigidity. The following theorem shows the equivalence of infinitesimal angle rigidity and infinitesimal bearing rigidity in the plane, which also implies the feasibility of angle-based approach for determining a framework in the plane.
Theorem 6
A framework
Proof: TODO
It's proved that infinitesimal bearing rigidity is a generic property of the graph. That is, if
is infinitesimally bearing rigid, then is infinitesimally bearing rigid for almost all configuration . The underlying approach is showing that a framework embedded by a graph is either infinitesimally bearing rigid or not infinitesimally bearing rigid for all generic configurations A configuration is generic if its coordinates are algebraically independent. The set of generic configurations in is dense.
Remark:
- From Theorem 6, infinitesimal angle rigidity is also a generic property of the graph, thus is primarily determined by the graph, rather than the configuration. In fact, angle rigidity is also a generic property of the graph. To show this, it suffices to show that an angle rigid framework
with a generic configuration is always infinitesimally angle rigid. In \cite[Theorem3-17]{Jing18}(TODO), we have shown that a generic configuration must be a regular point, i.e., . By Proposition 1 from the Chapter: Basis, there exists a neighborhood of , such that is a manifold of dimension . From the definition of angle rigidity and Theorem 1, we know that there exists a neighborhood of , such that is a manifold of dimension . By definition of the manifold, we have . Then . That is, is infinitesimally angle rigid. Hence, angle rigidity is also a generic property of the graph. By a similar approach, it can be easily obtained that global angle rigidity is also a generic property of the graph. - From Definition of infinitesimal angle rigidity, we can conclude that the minimal number of angle constraints for achieving infinitesimal angle rigidity is
. On the other hand, it has been shown in Theorem 8 about Algebraic property in the Chapter: Bearing that the minimal number of edges for a framework to be infinitesimally bearing rigid is . By Theorem 6, the same is true for infinitesimal angle rigidity.
Consider a framework
In the following theorem, the connection between
Theorem 7
Given configurations
Proof: TODO
Remark:
One can realize that the validity of Theorem 7 will not be lost provided the complete graph
It is important to note that Theorem 7 cannot induce equivalence of global angle rigidity and global bearing rigidity. Some examples show that this equivalence holds, but we still have no idea of how to prove it. Nonetheless, we are able to establish the following result.
Theorem 8
If a framework
Proof:
Suppose
From the relatonship among bearing rigidity in Chapter: Bearing in arbitary dimensions, bearing rigidity is equivalent to global bearing rigidity. Since global angle rigidity obviously leads to angle rigidity, it can also induce global bearing rigidity.
To prove Theorem 1, we introduce the following theorem
Theorem 9: Constant-Rank Level Set Theorem
Let
Here is details of proof for Theorem 1
From Theorem 6,
Next we show
Note that
Construction of
From Definition of infinitesimal angle rigidity, it is easy to see that
Since each vertex has at most
An example of constructing
Note that for an infinitesimally angle rigid framework, the angle index set generated by Algorithm 1 is suitable but not minimally suitable for infinitesimal angle rigidity. For example, let
Remark:
Although
In fact, even for a complete graph, it is possible that the geometric shape cannot be determined by angle-only or bearing-only information. A typical example is the degenerate configuration shown in Figure 1 (d).
Generally, we hope to determine a framework
A class of frameworks uniquely determined by angles
It's introduced a particular class of Laman graphs termed triangulated Laman graphs, which are constructed by a modified Henneberg insertion procedure. In what follows, we will show that the shape of such frameworks can always be determined by angles uniquely. Let
Definition: $n$ -point triangulated Laman graph
Let
Note that the triangulated Laman graph considered here is an undirected graph. Now we give the following result for frameworks embedded by triangulated Laman graphs.
Lemma 6
A triangulated framework
Proof:
Details of Proof
- Sufficiency[2]: Let
be the set of strongly rigid configurations in where is the configuration space . We first show that is open and dense, and then show that each configuration in is infinitesimally distance rigid. Let vertices , , and form a -cycle of ; we then let be a proper subspace of as follows:
The codimension of
Recall that for a graph
Let
The proof will be carried out by induction on the number of vertices of
Since
For the inductive step, assuming that the statement holds for
On the other hand, by computation, we have
with
Since
- Necessity Suppose that strong nondegeneracy does not hold, then there exist
, such that and stay collinear. Note that has exactly edges. Let be the distance rigidity matrix. To guarantee , should be of full row rank. However, it is easy to see that , , and are always linearly dependent. Hence, cannot be of full row rank, which is a contradiction.
The following theorem shows that the shape of a strongly nondegenerate triangulated framework in the plane can always be uniquely determined by angles.
Theorem 10
A triangulated framework
- if and only if
is minimally infinitesimally angle rigid. A minimally suitable angle index set is
- only if
is globally angle rigid. A minimally suitable angle index set is , where if , and otherwise.
Proof: TODO
An example of strongly nondegenerate framework embedded by a triangulated Laman graph is shown in Figure 12 (a). The angles in red are constrained angles determined by
It is important to note that strong nondegeneracy is not necessary for a triangulated framework to be globally angle rigid. A simple counterexample is the framework shown in Figure 1 (d). The framework is globally angle rigid, but not strongly nondegenerate. Moreover, the angle index set we give in Theorem 10 is only one suitable choice, there are also other choices of the angle index set supporting minimal infinitesimal angle rigidity or global angle rigidity of
2. 3D Angle Rigidity [4]
Definition in 3D
An element
where
Remark:
The 2-D angle is calculated using the counterclockwise direction. However, the definition of each 3-D angle’s direction depends on the associated vertices’ coordinate frames, which are not assumed to be aligned and known in this 3-D angle rigidity. Although the 3-D angle defined in
In this section, we first introduce 3-D angle rigidity, then introduce the merging operation for two angle rigid angularities, and in the end discuss angle rigidity of convex polyhedra. All the discussions are confined to 3-D and the right-hand rule applies to all rotation operations of vectors.
The definition of equivalence, congruence, angle rigid and globally angle rigid in 2D are the same as 2-D. According to Definitions, global angle rigidity always implies angle rigidity, but the inverse is not necessarily true. This is different from bearing rigidity for which global bearing rigidity and bearing rigidity are equivalent.
Theorem 11: Nonequivalence between angle rigidity and global angle rigidity in 3D
An angle rigid angularity
We prove this theorem by constructing an angularity that is angle rigid but not globally angle rigid. Consider the angularity
We first check whether
Since a 2-D angle constraint
Given points
We now show that
Note that nongeneric embeddings of
Since an angle rigid angularity is not necessarily globally angle rigid, 3-D angle rigidity is a local property, which is not related to the number of angle constraints imposed on a specific angularity. However, if one wants to construct an angle rigid structure efficiently, the number of angle constraints and their distributions within an angularity become central, which motivates us to develop sufficient conditions to guarantee global angle rigidity. First, for two angularities
Lemma 7
If a 3-vertex angularity in 3-D is generically angle rigid, it is also generically globally angle rigid.
Proof: This is straightforward by following the proof in 2-D angle rigidity, i.e. Lemma 0.
Now, we develop the vertex addition operations for 3-D angle rigidity to construct an angle rigid angularity from the smallest 3-vertex angularity. Toward this end, we first define some related notions.
Definition: Constraints in 3-D
For a given angularity
- a new vertex
positioned at is linearly constrained w.r.t. if there is such that and is constrained to be on a ray starting from , e.g., is constrained in ray in Figure 14 (c). Later it's shown how to generate this constraint. is conically constrained w.r.t. if there are such that is generic and is constrained to be on a cone with as the cone’s apex and as the cone’s axis, e.g., is constrained in cone in Figure 14 (d). is near-spherically constrained w.r.t. if there are such that is generic and is constrained to be on a near-spherical surface with in the surface’s rotation axis, e.g., is constrained in near-spherical surface in Figure 14 (b).
For convenience, we also simply say
In contrast to the linear and quadratic constraints from 2-D angles [see Figure 14 (a) and (c)], each angle constraint in 3-D generally determines a surface [see Figure 14 (b) and (d)] making computations and the exploration of its properties in 3-D more challenging.
To deal with this challenge, inspired by those formation control approaches where counterclockwise direction information among agents is employed to exclude formations’ ambiguities, we also utilize counterclockwise direction constraints for 3-D angle rigidity to exclude angularities’ ambiguities.
Definition: counterclockwise / clockwise direction
For 4 points
Correspondingly, when the sign of the tetrahedron's volume is fixed to be positive (resp. negative), we say
Remark:
As shown in Figure 17(c), 2 noncoincident conic constraints
Motivated by Henneberg's construction which has been seen as a cornerstone for distance rigidity theory, we now develop 2 types of vertex addition operations to construct global angle rigid and angle rigid angularities in 3-D, respectively.
Definition: Type-I vertex addition
For a given angularity
- Case 1: 2 linear constraints
, in which , and and are not aligned but intersecting, see Figure 18(a); - Case 2: 1 linear constraint
and 1 conic constraint , in which , and and are not aligned but intersecting, see Figure 18(b).
Definition: Type-II vertex addition
For a given angularity
- Case 1: 3 near-spherical constraints
with generic and , see Figure 18(c). - Case 2: 2 near-spherical constraints
and 1 conic constraint with generic and , see Figure 18(d).
Now, we are ready to present a sufficient condition for global angle rigidity using Type-I vertex addition.
Proposition 3
An angularity in 3-D is globally angle rigid if it can be obtained through a sequence of Type-I vertex additions starting from a generically angle rigid 3-vertex angularity.
Proof:
Details of Proof
According to Lemma 7, a generically angle rigid 3-vertex angularity is globally angle rigid. Consider the 2 cases in the Type-I vertex addition given in the related Definition.
- If case 1 applies, each linear constraint corresponds to a ray according to Definition of counterclockwise direction. Then, the position
of the newly added vertex is unique since two rays, not aligned, starting from 2 different points may intersect only at one point; - If case 2 applies,
is again unique since a ray starting from the axis of a cone can have only one intersection with the cone.
Therefore,
In comparison, type-II vertex additions can only guarantee angle rigidity instead of global angle rigidity.
Proposition 4
An angularity in 3-D is angle rigid if it can be obtained through a sequence of Type-II vertex additions starting from a generically angle rigid 3-vertex angularity.
The proof can be easily constructed following similar arguments as those for Proposition 3 and Theorem 11. The only difference is that
Corollary of Proposition 1 & 2
For an angularity
Proof: Since the vertex set in the subangularity
Remark:
- The associated counterclockwise direction constraint introduced in the related Definition can be used to remove the reflection ambiguity such that the position of the added vertex
in the Type-I vertex addition operation (see the related Definition) can be globally uniquely determined. But this constraint is not sufficient to make the position of the added point in Type-II vertex addition operation (see the related Definition) globally uniquely determined. An example is given in Figue 13, where points are in the clockwise direction w.r.t. both points and . In other words, not only reflection ambiguity but also flex ambiguity may exist in Type-II vertex addition operation. - Note that Propositions 3 and 4 can also be used as topological conditions to check global angle rigidity and angle rigidity of angularities that can be sequentially constructed from a triangle, respectively. For those angularities that are not constructed through such sequential operations, rank-based algebraic conditions can be employed to check their infinitesimal or generic angle rigidity when the corresponding angularities' embedding
is known [15, Th. 3] TODO.
Merging two Angle Rigid Angularities
After introducing how to add 1 vertex to an angularity in Propositions 3 and 4, we now investigate how to add 3 vertices to an angularity [see Figure 19(a)], which becomes useful later for merging two angle rigid angularities.
Definition: 3-vertex addition operation
For a given angularity
- 2 unaligned linear constraints
, - 2 unaligned linear constraints
, - 1 conic constraint
- 1 associated counterclockwise constraint
for
in which
Now, we merge a 3-vertex generically angle rigid angularity to a globally angle rigid angularity by the 3-vertex addition operation [see Figure 19(a)].
Proposition 5
For a globally angle rigid angularity
Proof:
Details of Proof
Note that the positions of the added vertices
Since the vertex set and the embedding of
Proposition 6
Suppose that the angularity
Proof:
Details of Proof
According to Proposition 5, adding the vertices
Minimal Angle Rigidity
Minimal angle rigidity plays an important role in deriving angle rigidity's necessary and sufficient conditions. Inspired by Laman theorem for 2-D distance-constrained frameworks, we now present some results on 3-D infinitesimal minimal angle rigidity, whose definition is the same as 2D after replacing 2-D by 3-D.
Lemma 8
A 3-D angularity
The proof of Lemma 8 follows straightforwardly from the fact that the magnitude of each 3-D angle is invariant under its associated vertices' overall translation, rotation, and scaling.
Lemma 9
A 3-D infinitesimally minimally angle rigid angularity must have a vertex associated with more than 2 but fewer than 9 angle constraints.
From Lemma 8, the proof of Lemma 9 can be obtained straightforwardly by following the proof of Lemma 5.
However, according to Lemma 9, there are 6 cases for the number of the vertex's associated constraints, which makes it challenging to use Laman's induction method to get a necessary condition for angle rigidity. Instead, we focus on a special class of angularity, namely tetrahedral angularity whose angle set
Definition: triangular angle set & tetrahedral angle set
- We say
is a triangular angle set if for every , there also exists . - We say
is a tetrahedral angle set if is a triangular angle set and for every triangular angle subset , there always exists a vertex such that . - We say
is a tetrahedral angle subset corresponding to tetrahedron .
Definition: infinitesimally minimally and tetrahedrally angle rigid
An angularity
Let
Proposition 7
For an infinitesimally minimally and tetrahedrally angle rigid angularity
Proof:
Details of Proof
First, we prove
Then, we prove
Although there are only 2 cases for the number of the vertex’s associated tetrahedra in an infinitesimally, minimally and tetrahedrally angle rigid angularity, the combinatory form of those tetrahedra with respect to the other vertices in
Angle Rigidity of Convex Polyhedra
As is well known, distance rigidity of convex polyhedra is one of the oldest geometric problems and has been studied by Euler, Cauchy, and Gluck, to name a few. Although many distance rigidity-related results have been obtained for convex polyhedra, the problem of angle rigidity of convex polyhedra
1: We only consider closed polyhedra here.
For a convex polyhedron
- For a closed polyhedron, one can easily distinguish the inside that its surfaces enclose from its outside, so it is possible to define the positive directions of the faces to be the normals pointing outwards. Therefore, the angle constraints on the surfaces of such a polyhedron can be associated with the clockwise or counterclockwise directions.
Lemma 10
If all angles on the faces of a convex polyhedron
Lemma 11
If all edge lengths, angles in faces, and dihedral angles of a convex polyhedron
With the properties of the perturbation provided in Lemmas 10 and 11, we now provide a specific class of
Theorem 12
The angularity
Proof:
Details of Proof
Following the Definition, we consider
Considering an arbitrary face triangle
- all the face angles have the same values in
and because . - All the dihedral angles in
and have the same values because and have the same dihedral angles and is a scaling of . - Because
, the lengths of the edges in have the same values as the lengths of the corresponding edges in , which can be obtained by using the law of sines iteratively for the face triangles in and .
From the above 3 facts and using Lemma 11 for
Instead of focusing on convex polyhedra with triangular faces [see Figure 20 (a)], we now study the case of convex polyhedra whose faces are not necessarily triangles. Note that when a face is not a triangle, the face's vertices may become noncoplanar under perturbations, for which we now develop the operations of polygonal triangulation and surface triangulation.
Definition: Polygonal triangulation
Polygonal triangulation is the decomposition of a polygon into a set of triangles where any two of these triangles either do not intersect at all or intersect at a common vertex or edge.
Definition: Surface triangulation
Surface triangulation for a polyhedron
An example of surface triangulation is shown in Figure 20 (b). Then, we define the corresponding triangulated angularity.
Definition: Triangulated polyhedral angularity
Let
3: Since the sum of three interior angles of each triangle is
, each triangle has one redundant angle in the angle set.
Note that if
Lemma 12
When locally perturbing the convex triangulated polyhedral angularity
Proof:
Details of Proof
We first prove that under the given angle constraints all the triangles in a face of
To prove that all the vertices in each face
Lemma 13
When locally perturbing the convex triangulated polyhedral angularity
Proof:
Details of Proof
Note that after triangulating the faces of the polyhedron
Let the face where
Now, we present the main result about the convex triangulated polyhedral angularity.
Theorem 13
A convex triangulated polyhedral angularity
Proof:
Details of Proof
We prove Theorem 13 following the proof of Theorem 12. According to Lemma 12, one has that the vertices of
A face in a convex polyhedron is said to be infinitesimally angle rigid if the face can only translate, rotate and scale under any local perturbation. We now consider the case where each face of the convex polyhedron is infinitesimally angle rigid.
Corollary of Theorem 13
A convex polyhedron with infinitesimally angle rigid faces is angle rigid.
Proof:
Details of Proof
The proof of this corollary follows the proof of Theorem 12. On the one hand, all angles in each face will remain constant under a perturbation according to the definition of infinitesimally angle rigid face. On the other hand, translation and rotation of a face will not change the lengths of its edges. When one edge length is fixed under the perturbation, the scale of the infinitesimally angle rigid face is also fixed, which implies that the lengths of the other edges of the face are fixed. Note that each face of the convex polyhedron has at least three neighboring faces and each pair of them share a different edge with the original face. Therefore, by fixing edge length iteratively, all the edge lengths of the polyhedron will be fixed given one fixed edge length in the polyhedron. From the above two facts and Lemma 11, one has that the convex polyhedron is angle rigid.
Comparison With 2-D Angle Rigidity
Compared with the existing results in 2-D, the contributions of the developed 3-D angle rigidity in this article lie in 3 aspects.
- we show in Section: Angle Rigidity that each angle constraint determines a conic or nearspherical surface in 3-D, where a counterclockwise constraint is defined to avoid reflection ambiguity.
- The approaches of constructing and merging 3-D angle rigid frameworks are proposed in Section: Angle Rigidity and Section: Merging. The proposed sequential construction approach for 3-D angle rigid and globally angle rigid frameworks can also be employed as topological conditions to check 3-D frameworks’ angle rigidity.
- Angle rigidity of convex polyhedra is discussed in Section: Minimal Angle Rigidity, in which all the angle constraints only lie in the faces of polyhedra and no sequential construction from the given angle constraints is applicable.
References
- Gangshan Jing, G. Zhang, H. W. J. Lee, and L. Wang, Angle-based shape determination theory of planar graphs with application to formation stabilization, Automatica J. IFAC, vol. 105, pp. 117–129, Jul. 2019: arXiv; Note that the angle rigidity function was denoted by
and is replaced by in the paper. - X. Chen, M.-A. Belabbas, and T. Başar, Global stabilization of triangulated formations, SIAM J. Control Optim., vol. 55, no. 1, pp. 172–199, Jan. 2017: Appendix A.1
- Liangming Chen, Ming Cao and Chuanjiang Li, Angle rigidity and its usage to stabilize multiagent formations in 2-D, IEEE Trans. Autom. Control, vol. 66, no. 8, pp. 3667–3681, Aug. 2021:
Section II & III.- Liangming Chen and Ming Cao, Angle rigidity for multiagent formations in 3-D, IEEE Trans. Autom. Control, vol. 68, no. 10, pp. 6130–6145, Oct. 2023.