Basis
Introduction
"The whole is more than the sum of its parts." by Aristotle
Multiple Vehicles [1,2]
For millions of years, nature has presented examples of collective behavior in groups of insects, birds, and fish. This behavior has arisen to permit sophisticated functions of the group that cannot be achieved by individual members.
Collective behavior serves needs such as foraging for food, defense against predators, aggression against prey, and mating. Fish and birds particularly, as part of their group behavior, often display formation-type behavior. In this type of behavior, the relative positions of the fish or birds are preserved, and the formation moves as a cohesive whole.
Nature is inspiring humans to engineer multi-agent systems that mimic this distributed, coordinated behavior. The agents in such engineering systems are not living beings, but machines such as robots, vehicles, and/or mobile sensors. With this inspiration, formations of robots and autonomous or piloted vehicles are being deployed to tackle problems in both the civilian and military spheres, such as bush-fire control, surveillance, and underwater exploration. For various reasons, a formation of vehicles may constitute a more effective sensor than a single vehicle:
- Some tasks inherently require multiple sensors with known relative positions. For example, in 3D, when distances to an object of interest are measured, to determine the position of that object, at least 4 distance measurements from noncoplanar sensors with known positions are needed to uniquely localize the object, that is, to determine its position.
- Multiple sensors may have individually differing functionalities, which in aggregate give a new functionality to the sensor formation. For example, a group of UAV may include radio-frequency direction-sensing sensors on some vehicles and optical sensors on others, to allow target localization and target identification by the entire formation.
- Small, mobile sensors are often less expensive to deploy than a single large sensor.
- Multiple mobile sensors can cover a region of interest more quickly than a single sensor when the sensing range is too small to allow the whole region to be scanned from one position.
In conclusion, more efficient and complex task execution, robustness when one or more agents fail, scalability, versatility, adaptability, and lower cost.
Formation control and network localization are two fundamental tasks for multiagent systems that enable them to perform complex missions.
Formation Control [1,8]
From a control point of view, tasks are specified at both the level of the whole formation, determining, for example, way points for a path that the center of gravity of the formation is commanded to follow, as well as for the individual agents of the formation, such as maintaining their relative positions, or shifting from one formation shape to another formation shape. Certainly in formations occurring in nature, and commonly in synthetic formations, there is no single master agent exercising control over all other agents. Control tasks in some way are handled on a decentralized basis.
In meeting these objectives, various systems problems arise. The most basic problem is defining practical architectures for control, communications, and sensing. Suitable architectures, however, cannot be defined independently of one another. An overarching requirement is that architectures be scalable. The scalability requirement imposes the need for significant decentralization of information and controller structures. For example, in a formation of birds, no one bird can be expected to watch all of the other birds and compute its own trajectory using even partial knowledge of the trajectories of all of the other birds. Hence the amount of sensing, communication, and control computation by any one agent must be limited.
The goal of formation control is to direct each agent using local information from neighboring agents so that the entire team forms a desired spatial geometric pattern. While the notion of a formation as a geometric pattern has a natural meaning for robotic systems, it may also correspond to more abstract configurations for the system state of a team of agents.
Network Localization [8]
The goal of network localization is to estimate the location of each agent in a network using locally sensed or communicated information from neighboring agents. Network localization is usually the first step that must be completed before a sensor network provides other services, such as positioning mobile robots or monitoring areas of interest.
Graph Rigidity Theory [2]
Graph theory is a natural tool for describing the multi-agent formation shape as well as the inter-agent sensing, communication, and control topology in the decentralized case. This note is based on an important subset of this theory—rigid graph theory—since it naturally ensures that the inter-agent distance constraints of the desired formation are enforced through the graph rigidity. This implicitly ensures that collisions between agents are avoided while acquiring the formation.
We use the concept of graph rigidity as an abstraction of the rigidity of physical structures. In our case, the “vertices” of the “structure” are the agents and the “bars” connecting the vertices are the inter-agent distance constraints imposed by the desired formation. Within this framework, it is convenient to treat each agent as a point.
Preliminary: Graph Theory [4,5]
Please make sure you are familiar with the concept of graph
Consider an undirected graph with
Definition: complete graph
A graph
Definition: path
A path is a trail that goes from an origin vertex to a destination vertex by traversing edges of the graph.
Definition: connected
Two vertices
- the vertex set: the robots (and we may use the word agent interchangeably in the context)
- the edge set: the communication links between different robots
The incidence matrix:
For a connected and undirected graph, one has:
.
Define
The adjacency matrix:
The Laplacian matrix:
Lemma: Properties of **Laplacian matrix**
is orientation-independent is symmetric and positive semidefinite - If
is connected, then has one and only one zero eigenvalue, with with being a simple eigenvalue of if and only if the directed graph contains a (directed) spanning tree where is a column vector
Definition: induced subgraph
For a graph
Framework [2]
Definition: Framework
A framework is simply a realization of a graph at given points in Euclidean space. Specifically, if
The importance of a framework is that it can model a physical structure. That is, consider the so-called “bar-and-joint” framework, which is a structure made of rigid bars joined at their ends by universal joints. A bar-and-joint framework can be used to describe a wide range of static and dynamic structures, such as bridges, mechanical linkages, and biological molecules.
In 2D, treat
with
Introduce:
denote block diagonal matrix of the relative position.
The edge function (Specific for distance rigidity function denoted as
where the norm is the standard Euclidean norm, and the
Rigidity Theory [1,2]
Rigidity Graphs
Characterized by rigid body
Given a bar-and-joint framework, a fundamental question is whether it is rigid or not. By rigidity, we mean the non-deformation of the structure.
Roughly speaking, a formation is rigid if its only smooth motions are those corresponding to translation or rotation of the whole formation
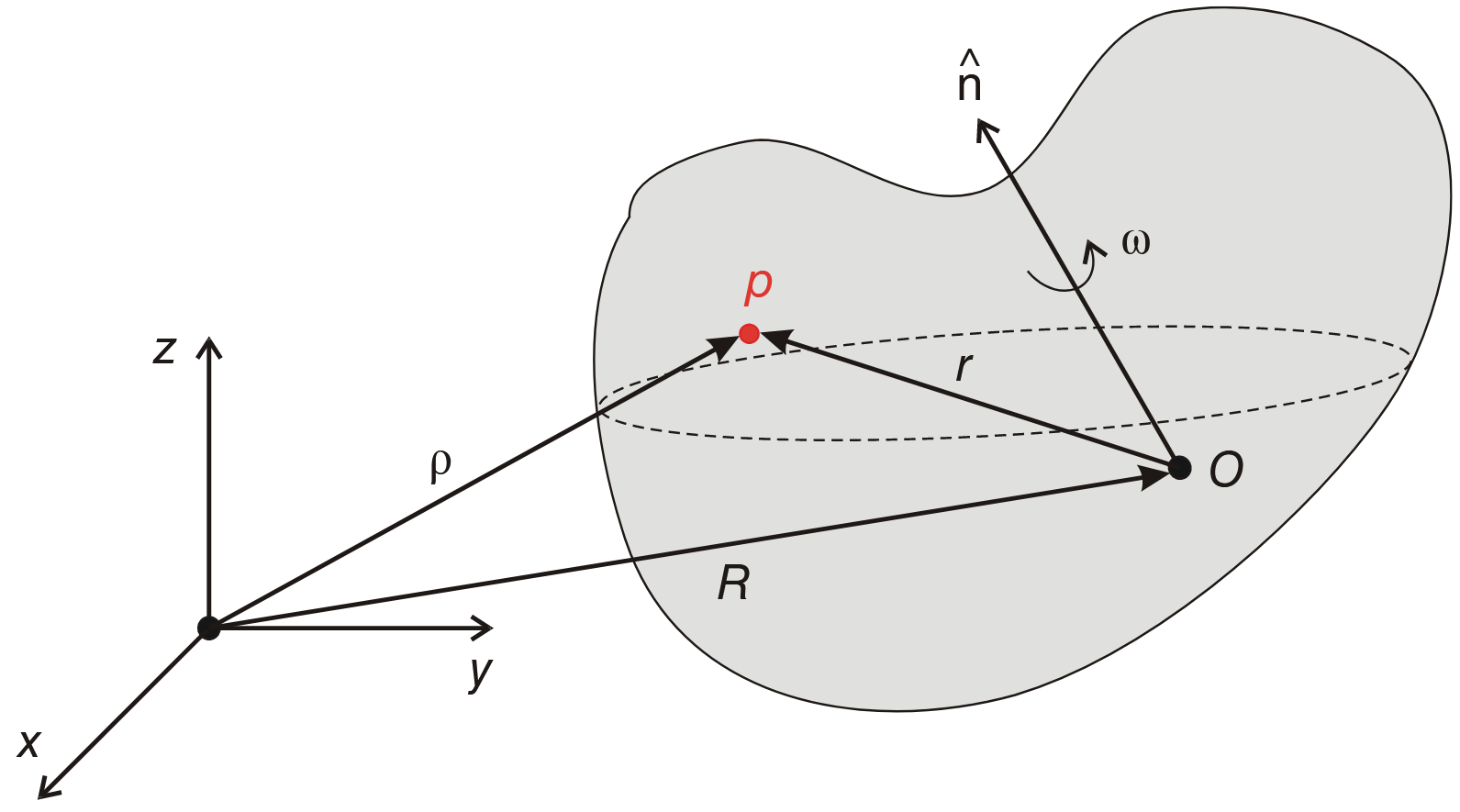
Definition: Translation and Rotation of a rigid body
A rigid body is said to be in translation if all points forming the body move along parallel paths (straight or curvilinear). A rigid body is said to be in rotation if all points move in parallel planes along circles centered on a same axis that intersects the body.
If the axis of rotation does not intersect the rigid body, the motion is usually called a revolution or orbit. This type of motion (in fact, any type of rigid body motion) can be decomposed into a translation superimposed on a rotation. That is, the above definitions allow one to decouple pure translation from pure rotation. Recall from rigid body kinematics that given body-fixed points
where
Definition: Equivalent & Congruent
Two frameworks
- Equivalent: if
for all , i.e., the edge function (2) is the same; - Congruent: if
for all (with ), i.e., all distances between vertices are the same (such pairs is always );
Note that congruency implies equivalency, but the reverse is not necessarily true.
Definition: isometry
An isometry of
Note that
Two frameworks
Definition
A motion of a framework
This leads us to the following definition of rigidity.
Definition: rigidity
A framework
On the other hand, the framework is flexible in
Chacaterized in Combination
Counting-type conditions related to the graph can be used to ascertain the rigidity or nonrigidity of a generic formation corresponding to the graph.
At first, define the Laman graph.
Definition: Laman Graph
A graph
The above is a combinatorial definition of Laman graphs. Its intuition is that the edges should be distributed evenly in a Laman graph.
Laman graphs may also be characterized by the Henneberg construction shown in the next 3 sections.
Laman's Theorem
A graph
If a graph
- there exists a subgraph
with edges such that, for every subset of , the induced subgraph of satisfies - if
, then is 3-connected (equivalently, every pair of vertices of is connected by three paths that pairwise have no vertices in common except the end vertices).
Characterized in Linear Algebra
First, embed the graph
Definition: (global) rigidity
A framework
Two frameworks
Now give the definition of regular point[7].
For a smooth map
Proposition 1
Let
Proof:
Details of Proof
Let
Since
It follows that if
Finally, a subset
Theorem 0
Let
and
TODO
Infinitesimal Rigidity
Although our physical intuition can indicate if certain frameworks are rigid or not, in general it is difficult to determine rigidity from the definition characterized by rigid body. Therefore, we will consider a related notion of rigidity called infinitesimal rigidity, which can be easily verified via a matrix rank.
In general, rigidity does not imply infinitesimal rigidity, but infinitesimal rigidity implies rigidity. Frameworks that are rigid but not infinitesimally rigid usually have collinear or parallel edges.
For so-called generic frameworks, rigidity is equivalent to infinitesimal rigidity. When a framework
For example, The planar framework in Figure below is nongeneric in
In infinitesimal rigidity, instead of preserving distances during a continuous deformation, we require first-order preservation of distances during an infinitesimal motion. Therefore, infinitesimal rigidity (also called first-order rigidity) is a linear approximation to rigidity.
In the definition of continuous family, i.e. formula
where
where
Definition: infinitesimal motion [6]
An infinitesimal motion is an assignment of velocities that guarantees the invariance of
where
When analyzing infinitesimal rigidity, the rigidity matrix of a framework comes in handy, which is defined as
Note that:
- the entries of
only involve relative position vectors , and we can rewrite it as . - the rigidity matrix has a row for each edge and
columns for each vertex. That is, for the -th edge of connecting vertices and , the -th row of is where is in the columns for vertex , is in the columns for vertex , and all other elements are zero.
A useful structural property of the rigidity matrix:
given any vector
Using
where
Let
Note that if a framework undergoes any rigid body motion, then according to
where
Notice that the vectors are defined here with dimension
irrespective of the Euclidean space of the framework. If the framework is planar, then .
It is not difficult to check that
upon use of the properties of vector products. In other words, rigid body motions produce infinitesimal motions. This leads us to the following definition.
Definition: infinitesimal rigidity
A framework is infinitesimally rigid if the only solutions to
We can use Definition above to determine if a framework is infinitesimally rigid or flexible by attempting to assign a velocity vector to each vertex such that
Fortunately, there is an easy way of checking whether a framework is infinitesimally rigid via the rank of the rigidity matrix. Before presenting this useful result, we need the following facts:
- the rank of an
matrix is equal to minus the dimension of its null space. - the number of independent rigid body motions for a generic framework in
is . This means that there exist independent rigid body motions in (translation along , translation along , and rotation about ) and in (translations along and rotations about ).
Given the above, we deduce that
Theorem 1 [3]
Consider a framework
Obviously, in order to have an infinitesimally rigid framework, the graph should have at least
From Theorem 1, one knows that the dimension of the null space of
Lemma 1: Null space of the rigidity matrix
Suppose the framework
: The null space of is of dimension and is described as , where
and the matrix
: The null space of is of dimension and is described as , where
and the matrix
TODO Proof
Lemma 2
Suppose the framework
TODO Proof
- if
is infinitesimally rigid, so is for a generic (open and dense) set of . - Generally speaking, infinitesimal rigidity implies rigidity, but the converse is not true.
As discussed earlier, the rigidity property of a generic framework
Theorem 2
Consider two frameworks
Here,
Proof:
Details of Proof
Let
Obviously,
Minimal Rigidity
It is obvious that adding edges to a graph does not destroy rigidity. A natural question is then: What is the minimum number of edges that ensures rigidity? This is important in practice because it ensures that a formation of multiple agents is rigid with the minimum number of sensing and communication links. The disadvantage of minimal rigidity is that it lacks robustness to the loss of a sensor or communication link since redundant edges are removed from the graph
Definition: minimally rigidity
A formation is minimally rigid if it is rigid and if no single interagent distance constraint can be removed without causing the formation to lose rigidity
A graph is minimally rigid if almost all formations to which the graph corresponds are minimally rigid.
As for minimal rigidity, it can be described in 2D and 3D with the rigidity matrix, is characterizable in 2D with Laman’s theorem, and, in 3D, is the subject of necessary conditions and distinct sufficiency conditions on the graph determined by a formation.
Given a graph with edge set
Theorem 3
A rigid graph is minimally rigid if and only if
This leads to the following corollary.
Corollary of Theorem 3
If a framework is infinitesimally and minimally rigid, then its rigidity matrix has full row rank and
Proof:
Details of Proof
Given that the rigidity matrix has
Note that
For an infinitesimally minimally distance rigid framework, there must exist a vertex associated with fewer than
Henneberg construction
The Henneberg construction deals with the iterative construction of rigid formations. As for the characterization of rigidity, the Henneberg construction procedure for 2D formations is better developed than that for 3D formations.
The 2D Henneberg construction comprises the application at each step of one of two possible operations, known as vertex addition and edge splitting.
The procedure begins with a minimally rigid graph, and the application of either operation creates a minimally rigid graph with one additional vertex. Minimally rigid graphs can be progressively built up this way
Definition: Henneberg Construction
The Henneberg construction is a technique for growing minimally rigid graphs, starting from a graph with two vertices and one edge joining the vertices.
At each step in the procedure, illustrated in greater detail below, either a vertex and two edges are added, or a vertex and three new edges are added, while one existing edge is removed. The new edges are incident on the new vertex. These operations are termed vertex addition and edge splitting, respectively.
vertex addition Let
be a graph modeling a formation in 2D. A new graph is formed, where a vertex v is adjoined as well as two edges from to , so that and for some . edge splitting A new graph
is formed from , where and for some with at least two of the vertices adjacent in , and the edge either , or
These vertex-addition and edge-splitting operations are enough to grow every minimally rigid graph. It is also possible to deconstruct a minimally rigid graph by removing one vertex and a net count of two edges at each step.
- In growing and deconstructing a minimally rigid graph, all the intermediate graphs are minimally rigid
- A by-product is the fact that every 2D minimally rigid graph is constructible from a primitive comprising a two-vertex single edge graph by using a sequence of these operations
- A Henneberg construction starting from an edge connecting two vertices will result in a Laman graph. The converse is also true. That is if a graph is Laman, then it can be generated by a Henneberg construction
In 3D, operations that are analogous to vertex addition and edge splitting can be defined, but whether these analogously defined operations are necessary and sufficient to build and deconstruct all minimally rigid graphs is still a matter of conjecture
Framework Ambiguities
Consider that a graph
- flip ambiguity: one vertex can be flip to another side. This occurs when a graph in
has a set of vertices lying in a -dimensional subspace about which a portion of the graph can be reflected. Notice that there cannot be any edges between the portions of the graph separated by the mirror edge. - Not every minimally rigid graph contains a flip ambiguity
- Multiple flips can happen in a given framework
- discontinuous flex ambiguity: positions of 2 or more vertexes can be changed while satisfying the constraints. This occurs in minimally rigid graphs since the removal of an edge allows a portion of the graph to flex. If the removed edge is reinserted after a flexing, one may obtain an equivalent framework with a different configuration.
- Every formation corresponding to a minimally rigid graph with four or more vertices at generic positions can exhibit flex ambiguity
This leads us to the following definition.
Definition: ambiguous
If two infinitesimally rigid frameworks are equivalent but not congruent, then they are said to be ambiguous.
We denote the set of all ambiguities of an infinitesimally rigid framework
The existence of framework ambiguities is problematic for formation control since the control law cannot distinguish the actual framework from an ambiguous one if only the edge lengths (i.e., inter-agent distances) are being controlled. In such a case, one solution is to initialize the agents sufficiently close to the desired framework to avoid their convergence to an ambiguous framework. From a control theory standpoint, this means that stability results will be local in nature rather than global. The following corollary to Theorem 2 will be helpful in establishing the stability.
Corollary of Theorem 2
Let
If
Details of Proof
First, note that
Globally Rigidity
Consider a formation with distinctly labeled agents and with some of the interagent distances known. We wish to understand what alternative formation shapes agents can have when they are positioned consistently with the data. Note that if the formation
Definition: globally rigidity
A 2D or 3D formation is globally rigid if and only if one of the following works:
- any two formations corresponding to the distance data differ by a combination of translation, rotation, and reflection
- every framework that is equivalent to
is congruent to shown in the definition of rigidity.
A graph is globally rigid if and only if a generic formation corresponding to the graph is globally rigid.
Global rigidity is a more demanding concept than rigidity since there exist rigid formations that are not globally rigid, and such formations can be converted to globally rigid formations only by the inclusion of additional distance constraints.
- Local rigidity: cannot cannot deform smoothly from one shape. Minimal rigidity therefore allows retention of shape only in the face of potential smooth deformations, although it does not of itself specify what shape is retained. But with same constraints, graph can have different shapes
- Global rigidity: ensure that the shape is unique
A nice characterization of global rigidity is available for 2D formations and their associated graphs. No extension is known for 3D formations. The 2D characterization uses the terms redundant rigidity and three connectivity.
Definition: redundant rigidity
An undirected graph is termed redundantly rigid if it remains rigid after the removal of any single edge.
Definition: connected graph
A graph is connected if there is a path from any vertex to any other vertex. A graph is
Theorem 4
A graph
- When a graph is globally rigid, a generic formation corresponding to the graph is also globally rigid.
- A variation of Laman’s theorem is available that characterizes the redundant rigidity property.
- A useful property of a 2D globally rigid formation is that if the positions of 3 noncollinear agents are known, then the positions of all the other agents can be uniquely determined from the interagent distances corresponding to the edges in the formation graph.
- For the trivial case of small graphs
, a complete graph is both necessary and sufficient for global rigidity - Globally rigid formations with 4 or more agents are not minimally rigid. A reason for using nonminimally rigid formations, where more constraints are imposed than are needed for shape maintenance: loss of a sensor / communication link / control actuator
Application:
- sensor network localization: unit disk graph use the distance data to determine the Euclidean coordinates for the sensor positions that are consistent with the distance set. The Euclidean coordinates, however, become uniquely specified by using further information obtained from designated anchor nodes or sensors, whose positions are known absolutely
Some problems arise in handling nonminimally rigid formations: if the distances between agents in a formation are measured with some noise and controls operate to try to bring certain distances to specified values, a similar type of inconsistency will be likely to arise
Generic Rigidity [8]
One can ask, for a given bar framework
So, we are led to consider the question of whether “most” configurations
Definition: algebraically dependent, generic
A set
We raise a possibly more tractable problem. For a given graph
For
For
Theorem 5 (Theorem 4 in arbitary dimension)
Let
- The graph
is vertex -connected. - The framework
is redundantly rigid in .
Condition 1 is clear. One just reflects the vertices on one side of a hyperplane through any separating set of
It is natural to conjecture that conditions 1 and 2 are sufficient for generic global rigidity as well as necessary. Unfortunately, for
On the other hand, it is known that rigidity is a generic property. In other words, if
References
- B. D. O. Anderson, C. Yu, B. Fidan, and J. M. Hendrickx, Rigid graph control architectures for autonomous formations, IEEE Control Syst. Mag., vol. 28, no. 6, pp. 48–63, Dec. 2008.
- Marcio de Queiroz, Xiaoyu Cai, and Matthew Feemster, Formation Control of Multi-Agent Systems: A Graph Rigidity Approach. USA: John Wiley & Sons, Ltd, 2019. Accessed: Dec. 31, 2025: Section 2.
- Bruce Hendrickson, Conditions for unique graph realizations, SIAM J. Comput., vol. 21, no. 1, pp. 65–84, Feb. 1992.
- Zhiyong Sun, Changbin Yu, and B. D. O. Anderson, Distributed estimation and control for preserving formation rigidity for mobile robot teams, Sep. 19, 2013. Accessed: Dec. 29, 2025: Preliminaries part.
- Zhiyong Sun, M.-C. Park, B. D. O. Anderson, and H.-S. Ahn, Distributed stabilization control of rigid formations with prescribed orientation, Automatica J. IFAC, vol. 78, pp. 250–257, Apr. 2017: Preliminaries part.
- Gangshan Jing, G. Zhang, H. W. J. Lee, and L. Wang, Angle-based shape determination theory of planar graphs with application to formation stabilization, Automatica J. IFAC, vol. 105, pp. 117–129, Jul. 2019: Preliminaries part.
- L. Asimow and B. Roth, The Rigidity of Graphs, Transactions of the American Mathematical Society, vol. 245, pp. 279–289, 1978.
- Robert Connelly, Generic Global Rigidity, Discrete Comput. Geom., vol. 33, no. 4, pp. 549–563, Apr. 2005: Part 1.2.
- Shiyu Zhao and Daniel Zelazo, Bearing rigidity theory and its applications for control and estimation of framework systems: life beyond distance rigidity, IEEE Control Syst. Mag., vol. 39, no. 2, pp. 66–83, Apr. 2019: 1st Part.