Bearing-based Formation Control [1]
1 Introduction
This section introduces the theory of bearing-based formation control, which studies how to steer a group of agents to achieve a bearing-constrained target formation using relative position measurements.
Consider a group of mobile agents, where the first
Before giving the proposed controllers with convergence proofs, the following assumption is adopted.
Assumption 1
Any formation
Assumption 1 gives 2 useful conditions.
- By Theorem 10 in Chapter: Bearing, the target formation specified by the bearing constraints has a unique shape.
- By Theorem 8 in Chapter: Bearing, a mathematical condition that
and where is the bearing rigidity matrix. Since the distance term in does not affect its rank or null space, the condition given by Assumption 1 actually is
This condition will be crucial to the following convergence analysis.
2 Single Integrators
First, consider the case where the dynamics of each mobile agent can be modeled as the single integrator
where
2.1 Leaderless Case [2]
If there are no leaders, then the bearing-based formation control problem can be solved by
where
where
Convergence analysis
Since the system
Since
Note
Theorem 1: Convergence of Leaderless Control
Under Assumption 1, the trajectory of system
If
Proof:
Details of Proof
Denote
It is easy to verify that the centroid and the scale of the final formation are
Several remarks regarding Theorem 1 are given here.
Remark 1
- When
, the formation converges to a final formation with the bearings as instead of . In this case, although the final formation has the opposite bearings as desired, it can be viewed as a point reflection of the target formation and has the same shape. - The centroid of the final formation is the same as that of the initial formation. In fact, it follows from
that the centroid of the formation is invariant under controller . - Although the centroid is invariant, the scale of the formation is changed under controller
. Specifically, the scale of the final formation satisfies
The scale of the final formation is no larger than that of the initial formation. It is clear that the lower bound of
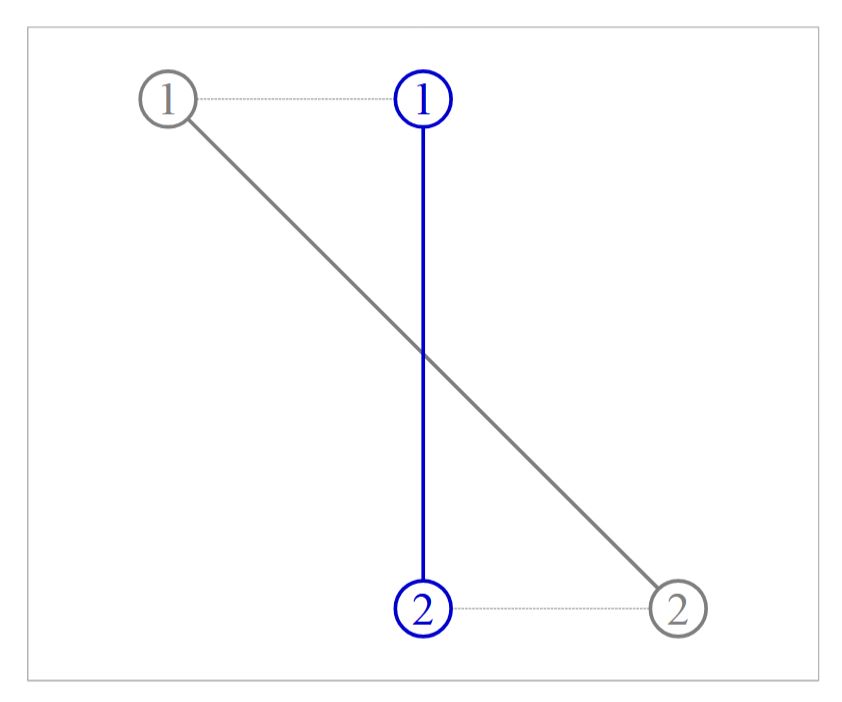
Figure 2.1 shows the simplest example to demonstrate controller
Although the controller
2.2 Stationary Leaders [2]
If the leaders are stationary, then the bearing-based formation control problem can be also solved by
The matrix form of the control law is
where
Control law
Convergence Analysis
The centroid and the scale of the finally converged formation are determined by the initial formation in the leaderless case, while the centroid and the scale of the formation can be controlled by the leader-follower controller
Lemma 1
Under Assumption 1,
Proof:
Details of Proof
For any
As a result,
When
Proof:
Details of Proof
If
which implies
Based on Lemmas 1 and 2, we have the following convergence result for the leader-follower formation controller.
Theorem 2: Convergence of Leader-Follower Control
Under Assumption 1, given
The finally converged formation satisfies the bearing constraints
Proof:
Details of Proof
Since
As shown in Theorem 2, the final formation
Note that control law
2.3 Moving Leaders with constant nonzero velocities [3]
One key problem that follows the definition of the target formation (with constant nonzero velocities for leaders) is whether the target formation exists and is unique.
In fact, this problem is equivalent to the localizability problem in bearing-only network localization. A formation can be uniquely determined by the bearings and the leaders if and only if the formation is localizable.
One useful sufficient condition is that a formation would be localizable if the formation is infinitesimally bearing rigid and has at least two leaders. This sufficient condition is intuitively easy to understand. Specifically, if the formation is infinitesimally bearing rigid, then it can be uniquely determined up to a translation and a scaling factor by the bearings. The translation and scaling ambiguity can be further eliminated by the introduction of at least two leaders. Then the formation can be fully and uniquely determined. Due to space limitations, we omit the details and simply make the following stronger assumption.
Assumption 2
The target formation
The mathematical condition implied by Assumption 2 is Lemma 1. It is worth noting that the infinitesimal bearing rigidity is merely sufficient but not necessary to ensure the existence and uniqueness of the target formation.
If the leaders move at a constant nonzero speed, then
where
By defining a new state for the integral term, control law
We next derive the matrix expression of control law
where
Convergence Analysis
Define the tracking error for the followers as
where
Lemma 3
Any formation
Proof:
Details of Proof
Note
By the elementwise expression of
Since the target formation
The
Proof:
Details of Proof
Suppose
As a result,
where
Since
Theorem 3 (Global Convergence with Constant Leader Velocities)
When
as
Proof:
Details of Proof
Since
By substituting
The target formation is globally stable under the action of control law
Centroid and Scale Dynamics
We next study how the leaders should move in order to realize the desired translational and scaling formation maneuvers under the action of the proposed control law. In order to do that, we need to first define the centroid and scale of a formation and then analyze their dynamics. Define the centroid
which is similar to that of
Proposition 1 (Translational Maneuvering)
If the velocity of each leader is constant and satisfies
where
which means the target formation
Proof:
Details of Proof
Since
Consequently,
Q.E.D.
Proposition 2 (Scaling Maneuvering)
If the velocity of each leader is constant and satisfies
where
which means the scale of the target formation
Proof:
Details of Proof
Since
and hence
Consequently,
and
Q.E.D.
In Proposition 2, if
When the velocity of the leaders is a linear combination of a translational and a scaling term, both the centroid and the scale of the formation will be time-varying. Denote
Theorem 4
Under Assumption 2, if the velocity of each leader is constant and there exist constant
where
Furthermore,
Proof:
Details of Proof
Since the target formation
Remarks on Theorem 4
- In order to achieve the desired translational or scaling maneuvering, the leaders must collaborate and share some global information like a common velocity and the centroid of the formation.
given in is constant because the unit vector is invariant to translational and scaling maneuvers though is not.
2.4 Moving Leaders with time-varying velocities
If the leader velocities are time varying, then
where
- The nonsingularity of
is guaranteed by the bearing localizability of the target formation with following Lemma 4. - Multiplying
on both sides of yields , where for . It follows that as for all , and consequently when the network is bearing localizable.
Lemma 4 [4]
The matrix
Proof:
Details of Proof
First of all, the matrix
Under the action of
3 Double Integrators
Consider the case where the dynamics of each mobile agent can be modeled as a double integrator
where
3.1 Moving Leaders with constant nonzero velocities [4]
If the velocities of the leaders are constant, then the bearing-based formation control problem can be solved by
where
3.2 Moving Leaders with time-varying velocities
If the velocities of the leaders are time varying, then the following control law requiring acceleration feedback can be used to track time-varying target formations:
where
In practice, absolute acceleration can be measured by each agent using, for example, IMU and then transmitted to its neighbors by wireless communication. Because of measurement errors and transmission delays, the acceleration measurement is corrupted by errors. However, since the system is linear, bounded acceleration errors would cause bounded tracking errors. Bearing-based formation control in the presence of other problems (including input disturbance, input saturation, and collision avoidance) was addressed in [4]. TODO
4 Bearing-Based Formation Control of Unicycles [5]
Suppose the dynamics of agent
where
When there are no leaders,
Details from [5] can be seen in Formation Control of Mobile Agents With Motion Constraints.
5 Bearing-only Formation Control
This section introduces the theory of bearing-only formation control, which studies how to steer a group of agents to achieve a bearing-constrained target formation using bearing-only measurements. Suppose the target formation is specified by constant bearing constraints
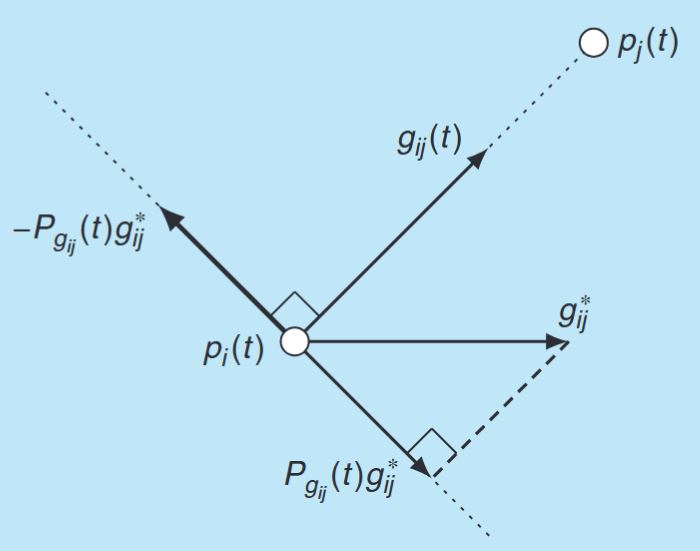
The following nonlinear control law, proposed in [28], can be used to solve the bearing-only formation control problem:
where
- The control of each agent requires only bearing measurements and no distance or position estimation.
- The control input of
is always bounded as , since . - The centroid and scale of the formation are invariant under the control law. Here, the centroid is defined as the average position of the agents, and the scale as the standard deviation of the distances from the agents to the centroid.
Control law
Control law
The objective function is equal to zero if and only if
This control law requires both bearing and distance measurements. Removing the distance term
An optimization-based approach for bearing-only formation control can be found in [10] and [65] (TODO), where a bearing-only control law is proposed as
This is a gradient-descent control law with the corresponding objective function as
Since
References
- Shiyu Zhao and Daniel Zelazo, Bearing rigidity theory and its applications for control and estimation of framework systems: life beyond distance rigidity, IEEE Control Syst. Mag., vol. 39, no. 2, pp. 66–83, Apr. 2019:
BEARING-BASED fORMATION CONTROL.- Shiyu Zhao and Daniel Zelazo, Bearing-based distributed control and estimation of multi-agent systems, in 2015 European Control Conference (ECC), Jul. 2015, pp. 2202–2207:
Section IV. Convergence Analysisexcept theNetwork Localizationpart.- Shiyu Zhao and Daniel Zelazo, Bearing-based formation maneuvering, in 2015 IEEE International Symposium on Intelligent Control (ISIC), Sep. 2015, pp. 658–663:
Section III & IV.- Shiyu Zhao and Daniel Zelazo, Translational and Scaling Formation Maneuver Control via a Bearing-Based Approach, IEEE Trans. Control Netw. Syst., vol. 4, no. 3, pp. 429–438, Sep. 2017:
Lemma 4.- Shiyu Zhao, D. V. Dimarogonas, Zhiyong Sun, and D. Bauso, A General Approach to Coordination Control of Mobile Agents With Motion Constraints, IEEE Transactions on Automatic Control, vol. 63, no. 5, pp. 1509–1516, May 2018.
The network localization protocol in [1] is
where means the estimation of position. The objective is to drive for all as . ↩︎