Formation Control of Mobile Agents With Motion Constraints [1]
1 Problem Setup
For a given motion coordination task, let
Note that
where
The design of the gradient control law in
Here we consider general coordination control tasks that satisfy the following mild assumption. Let
Assumption 1
For a given coordination task, functions
is compact for any . - There exists
such that in . and are bounded for bounded . is continuous in and uniformly continuous[1] in .
Assumption 3 implies that
Assumption 3 is satisfied by a wide range of coordination control laws such as the distance-based formation control law and bearing-based formation control as shown below. In these examples, the underlying graphs are assumed to be bidirectional and connected. If the graph is not bidirectional, the control laws may still work, but they may not be gradient control laws. For the sake of simplicity, suppose the weight for each edge to be
Example 1: Distance-Based Formation Control
The objective of distance-based formation control is to steer a group of agents from some initial positions to a desired geometric pattern defined by constant interneighbor distances
Then,
is the distance-based formation control law. We next show that all the conditions in Assumption 3 are satisfied. Consider any oriented graph and define the error state as
2 Nonholonomic Constraints
In this section, we modify the gradient control law in
A. Modified Gradient Control Law
Let
where
Our objective is to design
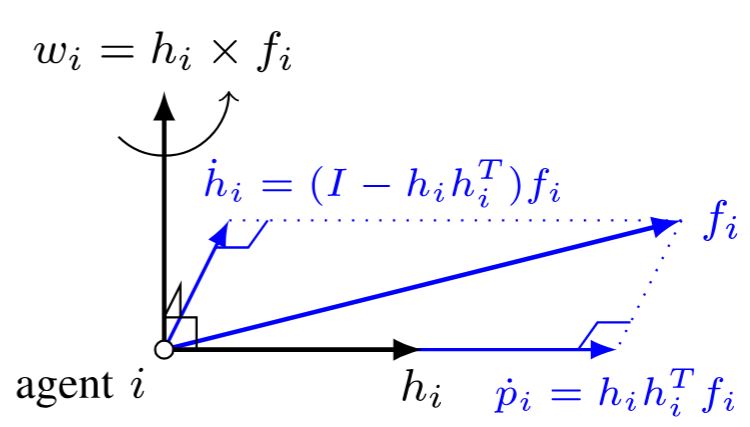
The geometric interpretation of
Then, we have
where the last equability follows from the fact that
Note that
The convergence of
Theorem 1 (Modified Gradient Control Law)
Under Assumption 1, the modified gradient coordination control law
Proof:
Details of Proof
The error dynamics corresponding to
It follows that
Theorem 1 indicates that if
B. Application to Unicycle Models
Considering that unicycle models have been widely considered in multiagent coordination control, we apply
Let
where
The convergence of the control law is proved below.
Theorem 2 (Control Law for Unicycle Agents)
Under Assumption 1, control law
Proof:
Details of Proof
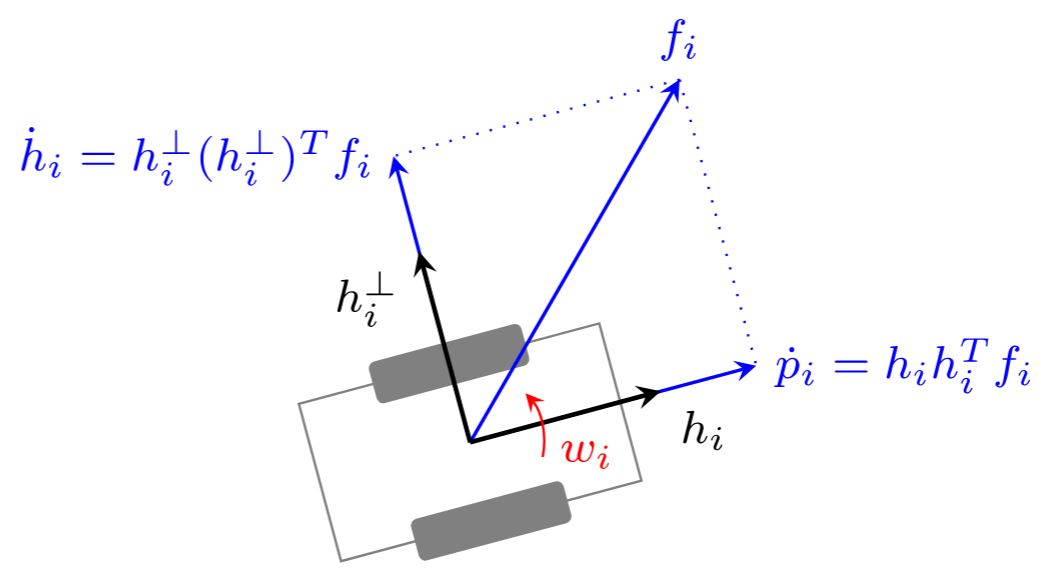
Let
The geometric interpretation of the control law in
Example 2 (Displacement-Based Formation Control of Unicycles)
Consider the displacement-based formation control law
Another well-known formation control law for unicycles proposed in [1, eq.
The two control laws in
Example 3: Displacement-Based Formation Control
The objective of displacement-based formation control is to steer the agents from some initial positions to converge to a desired geometric pattern defined by constant relative positions
The target formation is achieved if and only if
is the displacement-based formation control law. Consider any oriented graph and define the error state as
Example 4: Bearing-Based Formation Control
The objective of bearing-based formation control is to steer the agents from some initial positions to converge to a desired geometric pattern defined by constant interneighbor bearings
where
is the bearing-based formation control law. For any oriented graph, define the error state as
References
- Shiyu Zhao, D. V. Dimarogonas, Zhiyong Sun, and D. Bauso, A General Approach to Coordination Control of Mobile Agents With Motion Constraints, IEEE Transactions on Automatic Control, vol. 63, no. 5, pp. 1509–1516, May 2018:
Section II & III, Appendix.
A function
is uniformly continuous in if for any there exists 0 such that for every pair of and satisfying . A sufficient (yet not necessary) condition for uniform continuity is that if a function is differentiable and its derivative is bounded, then the function is uniformly continuous. This sufficient condition will be frequently used in the proof of Theorem 3. ↩︎