4 李群和李代数
在SLAM中,除了表示外,还需要对其进行估计和优化。因为在SLAM中位姿是未知的,需要解决什么样的相机位姿最符合当前观测数据这样的问题。一种典型的方式是构建成一个优化问题,求解最优的
旋转矩阵自身带有约束(正交且行列式为1),作为优化变量时会引入额外的约束,使优化变得困难。通过李群-李代数间的转换关系,希望把位姿估计变成无约束的优化问题,简化求解方式。
4.1 李群和李代数基础
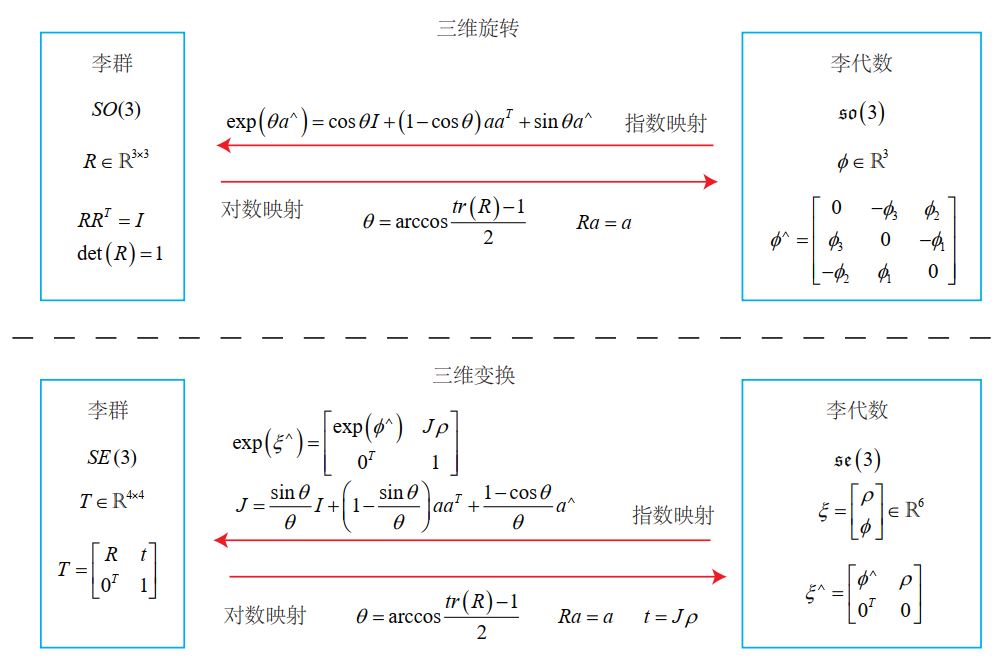
特殊正交群:
特殊欧氏群:
旋转矩阵和变换矩阵对于加法不封闭,但是对于乘法封闭。乘法对应着旋转或变换的复合。
4.1.1 群
群是一种集合加上一种运算的代数结构,满足:
- 封闭性
- 结合律
- 幺元
- 逆
旋转矩阵集合和矩阵乘法构成群,变换矩阵和矩阵乘法也构成群。
矩阵中常见的群:
- 一般线性群
的可逆矩阵 - 特殊正交群
- 特殊欧氏群
李群是指具有连续(光滑)性质的群,像整数群那样离散的群没有连续性质,不是李群。特殊正交群和特殊欧氏群在实数空间上是连续的,都是李群。能够直观想象一个刚体连续在空间中运动。
4.1.2 李代数的引出
考虑任意旋转矩阵
两边对时间求导,得到:
可以看出,
设
上式是一个关于
不过,由于做了一定的假设,故只在
4.1.3 李代数的定义
每个李群都有与之对应的李代数。李代数描述了李群的局部性质。通用的李代数的定义如下:
李代数由一个集合
封闭性:
双线性:
自反性:
Jacobi等价:
李括号表达了两个元素的差异。它不要求结合律,而要求元素和自己做李括号之后为零的性质。
三维空间中定义的叉积是一种李括号,
4.1.4 李代数
之前提到的
在此定义下,两个向量
4.1.5 李代数
对于
此处拓展了^的含义。
李代数
4.2 指数与对数映射
4.2.1
计算
通过泰勒展开写出,即:
令
推导得到:
此公式和罗德里格斯公式如出一辙。这表明,
定义对数映射,也可以把
指数映射只是一个满射,可能存在多个
4.2.2
其中,
附:
由于
4.3 BCH公式与扰动模型
4.3.1 BCH公式与近似形式
BCH公式:
当处理2个矩阵指数之积时,产生一些由李括号组成的余项。当
对一个旋转矩阵左乘一个微小旋转矩阵,可以近似看作在原有的李代数加上一项。注意左乘近似和右乘近似。
BCH近似的意义:
对于
4.3.2
对于李代数求导有很强的实际背景。不妨设小robot在某个时刻的位姿为
由于观测噪声
假设一共有
求解此问题需要计算目标函数
使用李代数解决求导问题的思路恩分为2种:
- 用李代数表示姿态,根据李代数加法对李代数求导
- 对李群左乘或右乘微小扰动,对该扰动求导
4.3.3 李代数求导
考虑一个空间点
其中第2行 BCH 线性近似,第3行泰勒展开舍去高阶项后的近似,第4-第5行将反对称符号看作叉积,交换之后变号。
4.3.4 扰动模型
另一种求导方式是对
设右扰动
4.3.5 SE(3) 上的李代数求导
假设某空间点
将最后的结果定义成算符
右扰动如下:
4.4.2 评估轨迹的误差
实际工程中经常需要评估一个算法的估计轨迹与真实轨迹的差异来评价算法的精度。真实轨迹往往通过某些更高精度的系统获得,而估计的轨迹则是由待评价的算法计算得到的。
误差指标可以有很多种,常见的有绝对轨迹误差
这实际上是每个位姿李代数的均方根误差 RMSE 。这种误差可以刻画两条轨迹的旋转和平移误差。
也有文献仅考虑平移误差,因为从整条轨迹上看,旋转出现误差后,随后的轨迹在平移上也会出现误差。定义绝对平移误差:
除此,也可以定义相对的误差。例如,考虑
同样的,也可以只取平移部分。
4.5* 相似变换群与李代数
在单目视觉中使用相似变换群
单目具有尺度不确定性,如果在单目 SLAM 中使用
在相似变换中,我们把尺度
同样地,
它比
通过指数映射,我们能够找到李代数与李群的关系。对于李代数元素
旋转部分和
4.6 习题
- 证明
pf:
根据向量叉乘的旋转变换不变性,可知上式成立。
⼏何角度来理解:两个向量
- 证明
该式称为
因此,有如下公式,在预积分中大放异彩(流形的交换律):