Angle Rigidity applied in Multiagent Formation Control [1]
1. 2D
To achieve a planar formation by a group of mobile robots, many formation control algorithms have been designed, most of which require the measurement of relative positions[2], or aligned bearings, or communication. In [2], a gradient-based formation stabilization control law is designed to achieve an infinitesimally angle rigid formation, in which the measurements of relative position and wireless communication of neighbors' angle error information are both needed. In this section, we demonstrate how to stabilize a multiagent planar formation using only local angle measurements with the help of the angle rigidity theory.
For an agent
where
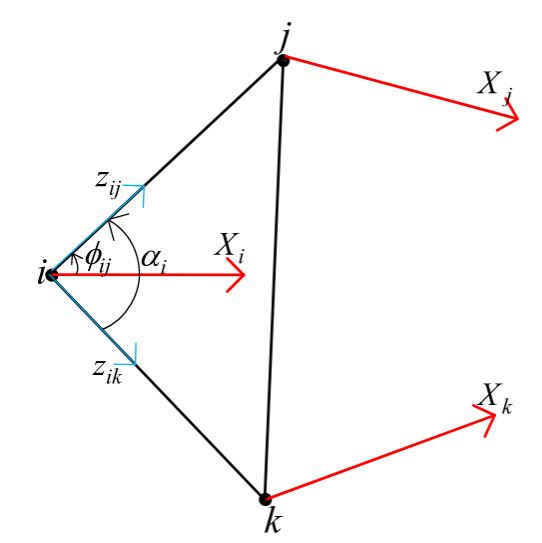
To avoid confusion in the stability analysis, we first describe all variables in a global coordinate frame and finally we demonstrate that this global coordinate frame is unnecessary. Now we define the bearing
where
using bearings
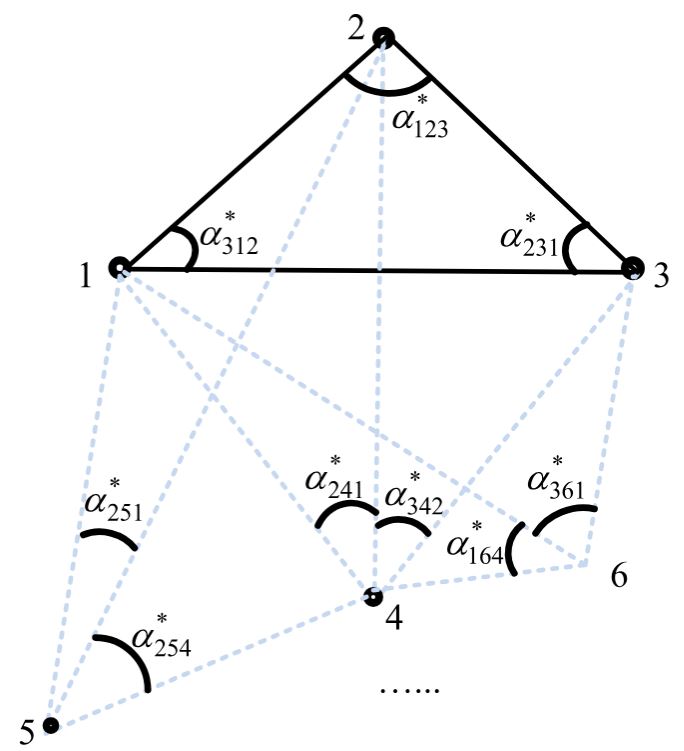
We construct the desired planar formation through a sequence of Type-I vertex additions (Case 3) from a generically angle rigid 3-vertex angularity, which is globally angle rigid according to Proposition 1 in angle rigidity. First, in an
where
where
Problem 1
Given feasible desired angles
Remark 1.1
One may also choose other cases in Type-I and Type-II vertex addition operations to construct the desired formations. However, the constructed formations are not globally angle rigid or the realization depends on the knowledge of the neighbors' angle error, which are the drawbacks of the other cases when they are applied to formation control. For example, in Case 1 of Type-II vertex addition [Figure 4(d) in angle rigidity], Proposition 2 in angle rigidity shows that the constructed formation is only angle rigid which may cause ambiguity; moreover, the angle
A. Triangular Formation Control for Agents 1-3
To achieve the desired angles for agents
where
To obtain the convergence of the angle errors, we first analyze the dynamics of the angle errors
By following the calculation in Appendix A (TODO), one has the first three agents' angle error dynamics
where
To guarantee that the triangular formation system under the control law
Lemma 1.1 (No collinearity)
For the three-agent formation, if the initial formation is not collinear, it will not become collinear for
Proof:
Proof of Lemma 1.1
Consider the manifold
Since
which implies that
Lemma 1.2 (No collision)
For the three-agent formation, if the initial angles
Proof:
Proof of Lemma 1.2
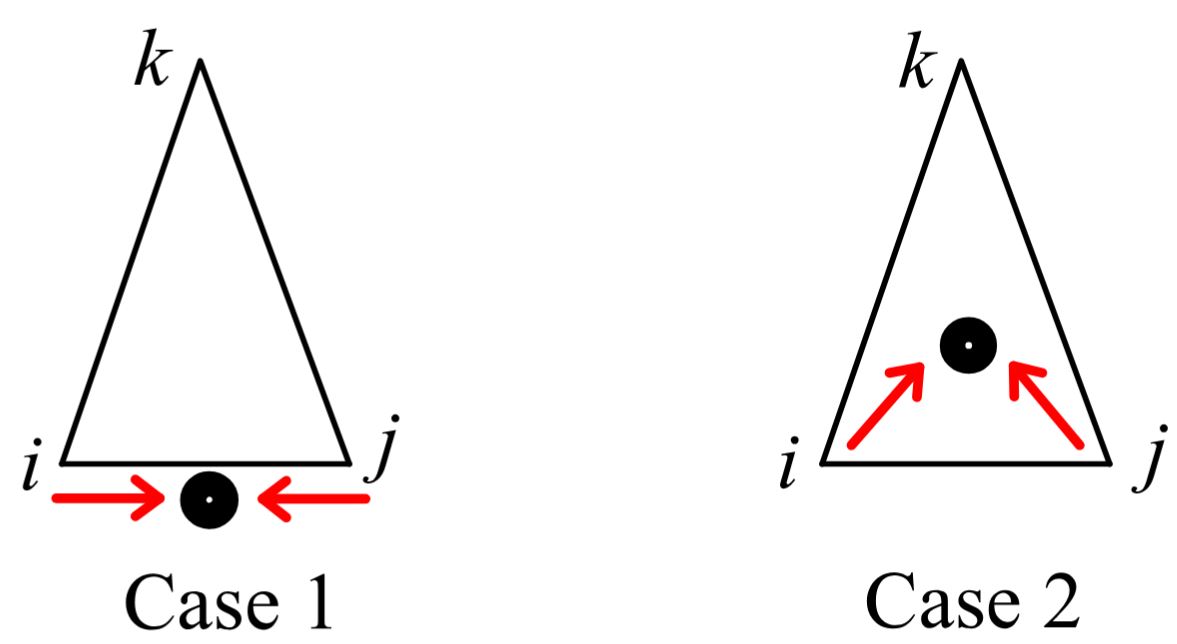
Suppose on the contrary that collision may happen between agents
For the first case,
For the second case, since agents
Now, we give the main result for the convergence of the triangular formation.
Theorem 1 (Stability of the first three agents)
For the triangular formation under the control law
Proof:
Proof of Theorem 1
From Lemmas 1.1 and 1.2, no collinearity and collision will take place since
Let
where
where
Taking the time-derivative of
which implies that
Also, one has
which implies that
Remark 1.2
With noncollinear initial positions, the first three agents' angle error dynamics
After proving that the first three agents converge to the desired formation, we now look at the remaining agents.
B. Adding Agents 4 to
In this subsection, we consider that agent
where
To prove the stability from agents 4 to
Then, one has the following result.
Lemma 1.3 (Stability of agent 4):
Suppose
Proof:
Proof of Lemma 1.3
To analyze the stability of the angle errors
where
Now, by conducting linearization towards
where
where
and, on the other hand
and
When
Taking the time-derivative of
Then, one has
which implies that the agent
Since
where we have used the fact that
Now, we present the main result for agents
Theorem 2 (Stability of all the agents)
Consider a formation of
Proof:
Details of Proof
From Lemma 1.3,
Remark 1.3
Note that the control laws
where
where
Remark 1.4
Although each agent's position in
where
Reference
- Liangming Chen, Ming Cao and Chuanjiang Li, Angle rigidity and its usage to stabilize multiagent formations in 2-D, IEEE Trans. Autom. Control, vol. 66, no. 8, pp. 3667–3681, Aug. 2021:
Section IV. Note thatis replaced by for bearing. - Gangshan Jing, G. Zhang, H. W. J. Lee, and L. Wang, Angle-based shape determination theory of planar graphs with application to formation stabilization, Automatica J. IFAC, vol. 105, pp. 117–129, Jul. 2019: arXiv.